如何降低 PFC 的 THD

总谐波失真 (THD) 是信号中存在的谐波失真,定义为一组较高谐波频率的均方根 (RMS) 振幅与一次谐波或基频的 RMS 振幅之比。公式 1 将 THD 表示为:

其中 Vn 是 n 次谐波的 RMS 值,V1 是基波分量的 RMS 值。
在电力系统中,这些谐波会导致从电话传输干扰到导体性能下降等各种问题;因此,控制总 THD 非常重要。THD 越低,电机中的峰值电流越低、发热越少、电磁辐射越低、磁芯损耗越小。
降低 THD 需要功率因数校正 (PFC),这是输入功率大于 75W 的交流 / 直流电源所必需的。PFC 会强制输入电流跟随输入电压,以便电子负载生成包含超小谐波的正弦电流波形。
THD 要求越来越严格,在服务器应用中尤其如此。模块化硬件系统通用冗余电源 (M-CRPS) 规范在整个负载范围内定义了非常严格的 THD 要求,如表 1 所示。这比之前的 CRPS THD 规范更为严格。

表 1. M-CRPS THD 规范
在传统的环路调优可能无法满足要求的 PFC 设计中,满足此类严格的 THD 规范是一项巨大的挑战。本文将提供几种方法来帮助降低 THD。
确保检测到的信号干净
PFC 控制器可检测交流输入电压、电感器电流和 PFC 输出电压。这些检测到的信号必须干净,否则会影响 THD。例如,由于交流输入电压信号生成正弦电流基准,因此检测到的信号上的任何尖峰都会导致电流基准失真并影响 THD。
尽管输出电压 (VOUT) 信号不用于生成电流基准,但它也可能会影响 THD,因为 VOUT 上的尖峰会在电压环路输出上产生纹波,这会影响电流环路基准并最终影响 THD。如果尖峰的幅度足够大,则可能会触发电压环路非线性增益,从而显著提高 THD。
一种常见的做法是将去耦电容器放置在靠近控制器检测引脚的位置。您必须仔细选择电容,以便有效降低噪声,但不引起过多延迟。使用一个数字无限脉冲响应滤波器来处理检测到的 VOUT 信号可进一步减少噪声;由于 PFC 电压环路比较慢,由该数字滤波器导致的额外延迟是可以接受的。
不过,对于交流电压检测,不建议添加数字滤波器,因为它会导致电流基准出现延迟。在这种情况下,您可以使用固件锁相环 (PLL) 来生成与交流电压同相的内部正弦波信号,然后使用生成的正弦波信号来调制电流基准。由于 PLL 生成的正弦波是干净的,即使检测到的交流电压上有一些噪声,电流环路基准也是干净的。
降低交流过零点处的电流尖峰
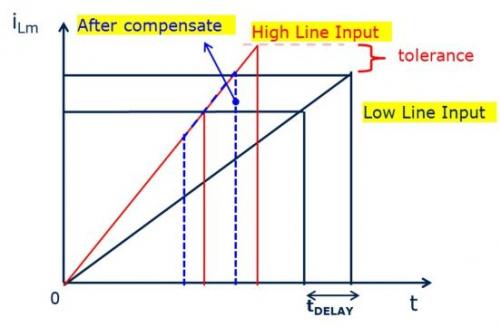
交流过零点处的电流尖峰是图腾柱无桥 PFC 的固有问题。这些尖峰可能会非常大,以至于无法符合 M-CRPS THD 规范要求。通过分析这些尖峰的根本原因,发现脉宽调制 (PWM) 软启动算法(如图 1 所示)可有效地减少尖峰。

图 1. 交流过零点处的栅极信号时序
在此解决方案中,当 VAC 在交流过零点后从负周期变为正周期时,有源开关 Q4 首先以非常小的脉冲宽度导通,然后逐渐增加到由控制环路生成的占空比 (D)。Q4 上的软启动会逐渐将开关节点漏源电压 (VDS) 放电至零。一旦 Q4 的软启动完成,同步晶体管 Q3 开始导通。它从很小的脉冲宽度开始,然后逐渐增加,直到脉冲宽度达到 1-D。当 Q4 的软启动完成且 Q3 的软启动开始时,低频开关 Q2 导通。
过零检测可能会被噪声错误地触发。出于安全考虑,在半个交流周期结束时,关断所有开关。这样会形成一个较小的死区,从而防止输入交流短路。从交流正周期到负周期的转换是相同的。图 2 展示了测试结果。

图 2. 不使用和使用 PWM 软启动功能时的电流波形:传统控制方法 (a) 和 PWM 软启动 (b)
降低电压环路影响
电压环路输出上的双倍工频纹波会影响电流基准,从而影响 THD。为尽可能减少这种频率纹波的影响,同时又不影响负载瞬态响应,您可以在 VOUT 检测信号和电压环路之间添加一个数字陷波(带阻)滤波器。该陷波滤波器可以有效地衰减双倍工频纹波,同时仍能传递所有其他频率信号,包括负载瞬态导致的 VOUT 突变。负载瞬态不会受到影响。
另一种方法是在交流过零实例处检测 VOUT。由于交流过零实例 Vout_zc(t) 处的 VOUT 的值等于其平均值,并且在稳态下是一个“常量”,因此它是用于电压环路控制的理想反馈信号。若要处理负载瞬态,请使用以下电压环路控制律:
If ((Vref – Vout(t) < Threshold)
{
Error = Vref – Vout_zc(t);
VoltageLoop_output = Gv(Error, Kp, Ki);
}
Else
{
Error = Vref – Vout(t);
VoltageLoop_output = Gv(Error, Kp_nl, Ki_nl);
}
如果瞬时 VOUT 误差很小,请使用交流过零实例 Vout_zc (t) 处的 VOUT 值和小比例积分 (PI) 环路增益 Kp、Ki 计算电压环路补偿器 Gv。当发生导致瞬时 VOUT 误差大于阈值的负载瞬态时,为 Gv 使用瞬时 Vout(t) 值和 PI 环路增益 Kp_nl、Ki_nl 可将 VOUT 迅速恢复至其标称值
过采样
PFC 电感器电流是在每个开关周期中具有直流偏移的锯齿波;该电流随后进入运算放大器等信号调节电路,使信号适合 PFC 控制电路。不过,该信号调节电路无法充分衰减输入电流纹波。电流纹波仍出现在放大器的输出端。如果该信号在每个开关周期内仅采样一次,则不存在该信号始终代表平均电流的理想固定位置。因此,使用单个样本时,很难实现良好的 THD。
为了获得更准确的反馈信号,建议使用过采样机制。图 3 展示了可在每个开关周期内对电流反馈信号进行八次平均采样,对结果求平均值,然后将其发送至控制环路。过采样有效地计算电流纹波平均值,以便测量的电流信号更接近平均电流值。此外,控制器对噪声(包括信号噪声和测量噪声)的敏感度会降低。过采样是减少电流波形失真的有效方法之一。

图 3. 在每个开关周期中进行八次过采样
占空比前馈
占空比前馈控制的基本原理是预先计算占空比,然后将此占空比添加到反馈控制器中。对于在连续导通模式下运行的升压拓扑,公式 2 可用于计算占空比 (dFF):

该占空比形式可在开关上有效地生成一个电压,此电压在一个开关周期内的平均值等于整流输入电压。常规电流环路补偿器会根据计算出的该占空比来更改占空比。
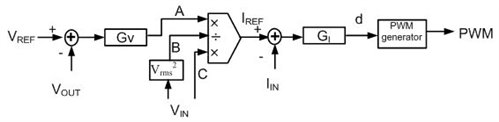
图 4 展示了得到的控制方案。使用公式 2 计算 dFF 后,将其与传统的平均电流模式控制输出 (dI) 相加。然后,可以使用最终得到的占空比 (d) 生成 PWM 波形以控制 PFC。

图 4. 平均电流模式控制和 dFF
鉴于占空比的大部分是由占空比前馈生成的,控制环路仅对计算出的占空比进行略微调整。这项技术可以帮助改善控制器环路带宽受限型应用中的 THD。
交流周期跳跃
通常,满足轻负载 THD 要求比满足重负载 THD 要求更困难,特别是要满足 M-CRPS 规范中的 5% 负载 THD 要求时。如果 PFC 满足除 5% 负载时以外的所有其他 THD 要求,那么即使您已尝试到目前为止提到的所有方法,交流周期跳跃方法也会有所帮助。
将交流周期跳跃想象成一个特殊的突发模式:当负载小于预定义阈值时,PFC 进入此模式,并根据负载跳过一个或多个交流周期。换句话说,PFC 在一个或多个交流周期内关断,然后在下一个交流周期重新导通。导通和关断发生在交流过零点处,以便跳过整个交流周期。由于 PFC 在电流为零时导通和关断,因此应力和电磁干扰较小。交流周期跳跃与传统的 PWM 脉冲跳跃突发模式(随机跳过 PWM 脉冲)不同。
要跳过的交流周期数与负载成反比;负载越小,跳过的交流周期就越多。图 5 展示了跳过一个交流周期。通道 1是交流电压,通道 4 是交流电流。

图 5. 轻负载下的交流周期跳跃
当 PFC 由于电流为零而关断时,THD 为零。由于 PFC 需要补偿关断周期,因此它在导通时会提供大于平均值的大功率。实际上,这会在中等负载下运行 PFC,或者将其完全关断。鉴于中等负载时的 THD 远低于轻负载时的 THD,轻负载 THD 有所降低。
测试结果
我们在通过德州仪器 (TI) C2000™ 微控制器控制的 3kW 图腾柱无桥 PFC [5] 上实施了本文所述的方法。图 6 展示了 240VAC 时的 THD 测试结果。

图 6. THD 测试结果
THD 不仅符合最新的 M-CRPS THD 规范,而且还具有足够的裕量,可确保 PFC 即使在具有硬件容差的情况下也能在大规模生产期间满足规范要求。



评论