电动轮椅控制系统的设计与实现

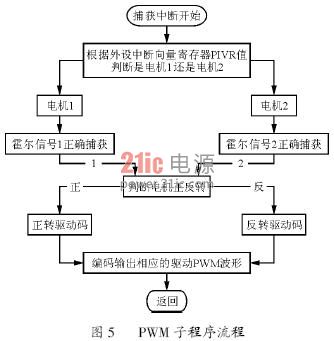
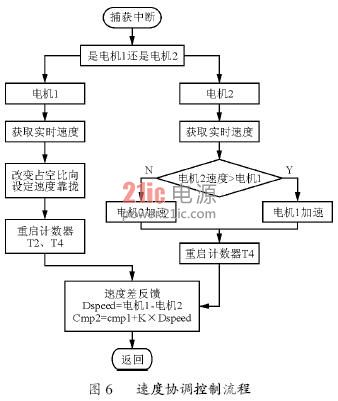
每次捕获中断发生时,分别对两路BLDCM的速度相关参数进行调整。
5 试验结果
为验证以TMS320LF2407A 为控制核心的系统的工作效果,对电路进行了实际的搭建和调试。
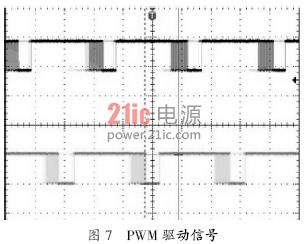
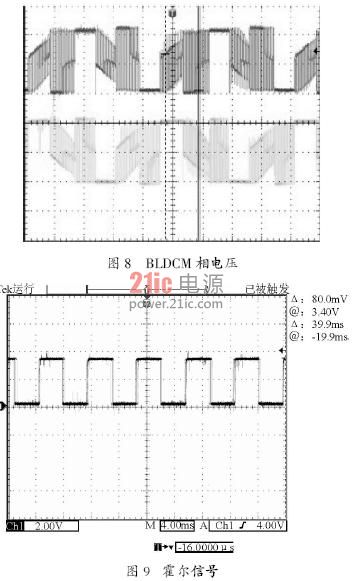
由图7、8、9 可见,系统运行平稳可靠,对按键指令的反映时间可以满足系统的控制要求。该系统已完成原理样机系统联机调试,两路电机均可以平稳转动,并且实现前进、后退、加速、减速、停止等基本功能,说明系统所采用的控制策略是恰当且成功的。并且图8 示出,系统的两路BLDCM同时工作时,其各路性能都达到了系统性能的要求。
6 结语
系统实际搭建后的试验结果表明,系统采取的上述措施是合理且成功的,它能使系统达到预期的性能要求。













评论