反激开关电源架构与电子电路设计盘点

利用电路平均法可推导出控制对象传递函数:
DCM控制对象
6SSR与PSR稳定性对比
SSR由于环路补偿器外置,且采样环节工作在线性区,可通过FRA法,准确得到开环传递函数Bode图;
PSR由于环路控制器集成,且反馈回路工作在强非线性区(脉冲采样变压器辅助绕组,估算输出电压),FRA法不再适用。
SSR控制对象只有90度相移(忽略高频右半平面零点),但叠加环路补偿器的纯积分的90度相移,存在不稳定可能(-180度),需靠合理设计零点来提升相位裕量和增益裕量;
PSR环路补偿器由于没有纯积分,开环传递函数达不到180度相移,不存在环路上的不稳定情况(假定芯片内置极点合理)。
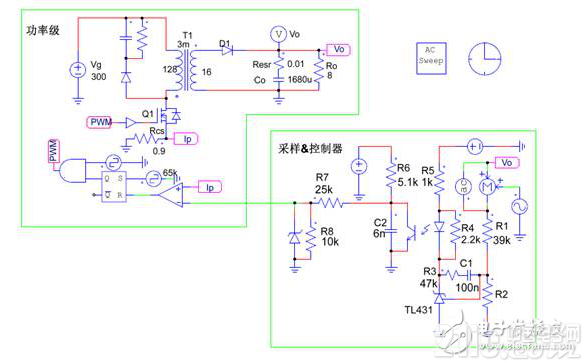
环路分析实例
以AP8267为例,电源工作在PWM模式,简化等效电路模型,如下图,可推导出各个环节的传递函数。

总结:理论分析和FRA仿真结果完全一致:直流增益相同,均有30dB(10Hz);穿越频率接近:在600Hz的相移均为80度;在高频10k处,均衰减-20dB。
开环传递函数对比
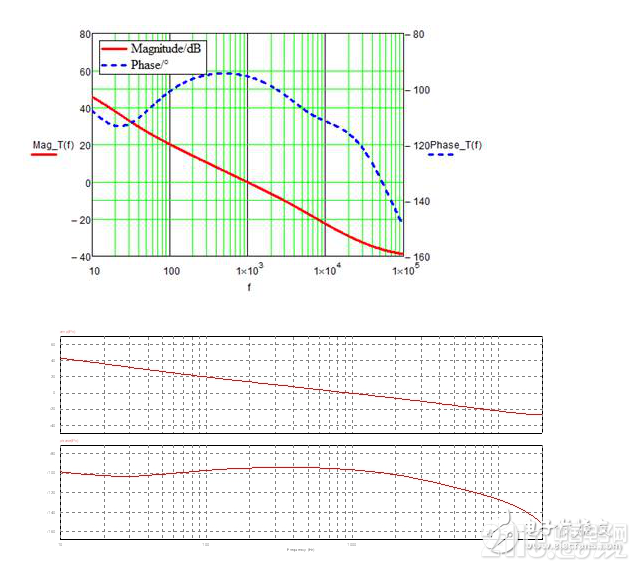
总结:理论分析和FRA仿真结果完全一致: 直流增益相同,均有45dB(10Hz),可实现无静差控制;穿越频率在1kHz附近,相位裕量有90度,裕量充足;在高频10k处,均衰减-20dB以上,抗干扰性强。













评论