脉宽调制(PWM) 马达驱动器电源的测试分析

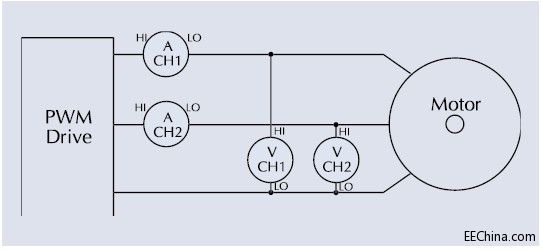
图4. PA4000A 输出测量
对于输出电流超过30 A 的脉宽调制驱动器,您可以使用外部电流传感器或外部电流分流器。泰克公司提供多种固定核心电流传感器,最高电流达1000 A。这些传感器包括电缆,实现与PA4000 的快速连接,并利用仪器的15 V 直流电源。当PA4000 功率分析仪与外部分流器一起使用时,您可以将分流器与外部分流电压输入相连。这些输入可以测量从X V 到Y V 的分流输出。对于电流传感器和外部分流器,重要的是,记住正确设置缩放比例。
特别是对于低电流驱动器, 如果可能, 应当将PA4000 直接与脉宽调制输出端相连。这是因为,尽管交流电流变压器和霍尔效应电流传感器在较高电流时提供良好的精度,但对于几安培的较低电流,其结果精度往往较差。
尽管在脉宽调制驱动器输出端出现极高的共模电压,为了从电流分流器得到优异的结果,PA4000 输入电路已经优化。分流器两端电压可能只有几毫伏,但分流器电势相对于接地端上下波动幅度高达数百伏,每微秒高达数千伏。
虽然采用两表法时,PA4000 只有两个通道用于测量,但该仪器将以矢量方式计算和显示第三条(非测量)线路的电流值。这将为权衡负载提供有价值的检查。此外,由于两表法不需要分析仪的第三个通道,它可以用作独立的测量通道,如测量脉宽调制驱动器内的直流总线,详见第7 部分介绍。
一旦分析仪进行连接和配置完毕,它将利用选定的滤波器测量驱动器输出功率。如果PA4000 测量频率有困难,应确保已经指定正确的滤波器频率范围。
注意,Vrms、Arms 和功率数字是通过预过滤值测得的,因此包括所有的高频分量,其中基波值只考虑对马达有用功的贡献。电压有效值与基波电压存在显著差异是很正常的。通常,在电流和功率之间的差异较小,因为感应马达对电流进行了过滤。
通过SUM 通道读取的总功率和基波功率之间的差异,可以估算高频损耗。这代表脉宽调制驱动器提供的电力,这部分电力对机械输出功率没有贡献,因此增加了马达的热量:
高频损耗= 总功率 - 基波功率
当进行脉宽调制驱动器比较时,这是非常有意义的测量。
6.驱动器直流总线测量
虽然脉宽调制驱动器输入和输出之间的连接称为直流总线,但这个总线上的电压和电流远非纯直流,因此,在进行所需的测量时必须小心谨慎。
直流总线测量最好在存储电容器输入端进行,如图5所示,因为从本质上讲,这里的电流是来自交流电源的低频电容器充电脉冲,是从逆变器吸收的高频电流脉冲中释放出来的。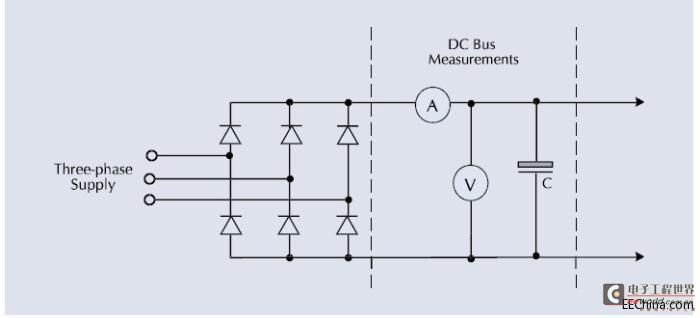
图5. 设置直流总线测量

表3. 直流总线关键测量参数
如果独立进行直流总线测量,可以利用分析仪的CH1( 通道1)。不过,直流总线测量往往与驱动器输入或输出的三相二线测量一起进行。在这种情况下,应当使用剩余独立运行通道中某个通道对直流总线进行测量。
例如,将CH1 和CH2 连接,进行输入或输出测量。CH3 与直流总线相连,如图5 所示。使用F[7] 选择脉宽调制马达驱动器输入或输出模式,并启动独立的CH3。
7.驱动器输入测量
从本质上讲,大多数脉宽调制马达驱动器输入电路是三相二极管整流桥,并包含电容滤波器,如图6 所示。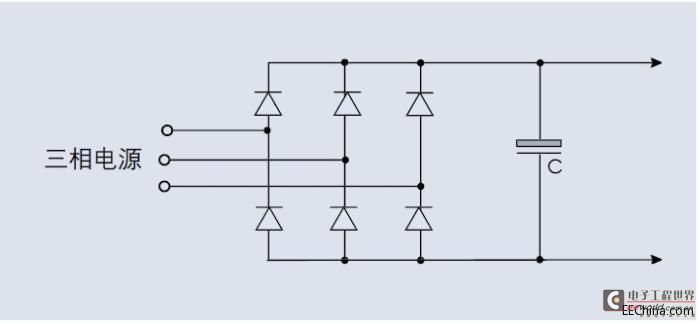
图6. 脉宽调制驱动器的输入整流器和滤波器级
每个输入相的电流波形由为存储电容器充电的脉冲组成。图7 给出某相的电流波形,它包括电源频率的基波分量以及大量谐波分量。
图7. 脉宽调制驱动器输入端电压和电流波形
如果驱动器的逆变器部分为输入电路提供一个恒流负载,那么每相的输入电流将是一个振幅恒定的失真波形,如图7 和图8 所示。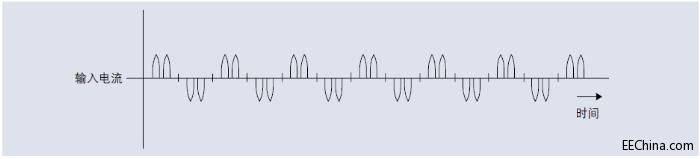
图8. 未经调制的输入电流波形
遗憾的是,脉宽调制驱动器的逆变器部分可能不向输入电路提供恒流负载;在这种情况下,从电容器吸收电流的负载电流将受到输出频率分量的影响。这意味着,来自交流电源的电流在工频频率是复杂的、失真的电流波形,它由驱动器频率进行调制。图9 给出其波形。调制可能严重影响测量,特别是在低驱动速率,不过,利用扩展的测量区间(为驱动器输出波形周期整数倍),可以解决这个问题。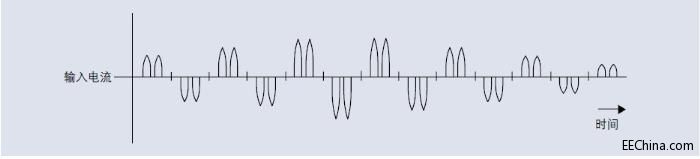
图9. 在输出频率处进行调制的输入电流波形
PA4000 支持脉宽调制驱动器输入功率的精密测量,即使马达处于低频时。输入功率测量与交流工频同步,但通过调节显示屏更新速率及均值设置,可以扩展测量区间。
表4. 选择显示屏更新时间和均值,把驱动器输出频率对驱动器输入功率测量的影响降到最小
对于超过20 Hz 的输出频率,PA4000 的默认设置通常将给出稳定结果。默认设置是:
显示屏更新速率:0.5 s
平均:10
当输出频率在5 Hz ~ 20 Hz 之间时,将均值设置为10,以改进稳定度;对显示屏更新时间进行设置,使之包括测得的脉宽调制输出周期(1/f) 的整数倍。根据经验法则,应提供10 个周期。
例如:
输出频率 = 5.5 Hz
显示屏更新速率 = 10/(5.5 Hz)= 1.8 s
对于低于5 Hz 的输出频率,使用最长的显示屏更新速率(2 s),平均为10。
例如,对单相驱动器进行测量时,如果读数太大,可以将均值设置为10 以上,以帮助使测量稳定。
分析仪通过三相三线配置进行连接,如图10 所示( 即所谓的两表法,关于利用n-1 台功率表可以测量通过n 条线路向系统提供电源的证明,请参见应用指南:三相测量原理)。

评论