CAN物理层调试基础知识及举例

图10:带有损坏CANH线路的CAN演示系统
图11所示CANH信号表明了该损坏PCB线路的效果。另外,DMM连续性检查也可证实该开路。
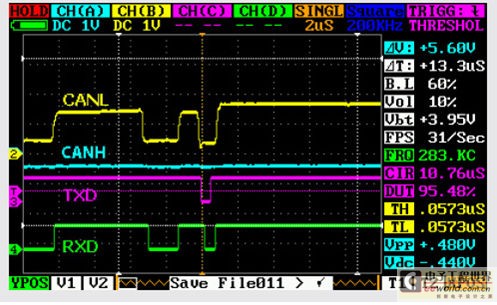
图11:PCB上CANH线路遭损坏的TI CAN信号
图 11还突出详细显示了CAN帧的另一个重要部分,即ACK位。示波器使用单一模式,在某个单比特发现触发器时,其在右手节点的TXD引脚上被触发。该单比特为这一节点产生的ACK位,目的是确认接收到一个有效的CAN帧。所有接收节点确认收到发送节点的CAN帧。相比在TXD上看到的发送ACK位,总线上所看到的ACK位的位时间稍长。这是同时发送ACK位的多个节点的假象。影响这种长位时间的一些因素包括:通过线缆的5ns/m延迟、三个CAN节点之间的时钟计时漂移以及同时发送一个ACK位的两个节点所产生的高差分电压。如果这些因素使ACK位(空档)变得更长,并在ACK分隔符内保持显性,则其可能引起CAN误差帧。
CAN总线调试的另一个例子是,在某个系统中,只有非常慢的CAN数据速率(比特计时)才会起作用。把一个示波器连接至TXD引脚,在TXD输入端显示出非常慢的上升时间,如图12所示。1Mbps的CAN数据速率下,9.6μs计时延迟相当于10比特。它的根本原因是:我们正使用一个具有开路漏极的微处理器来驱动收发器的TXD引脚。在这种情况下,没有真正的逻辑高电平驱动。仅有CAN收发器的弱内部上拉正驱动TXD引脚高,因此它的RC时间常量非常长。通过在TXD引脚上添加一个上拉电阻器,便可轻松解决这个问题。
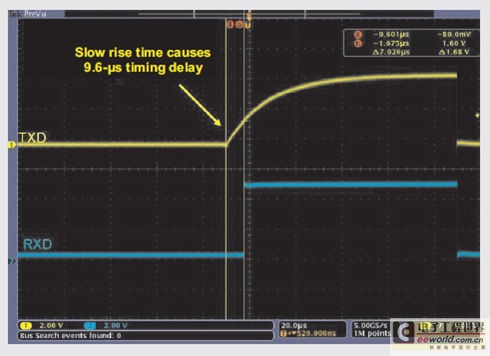
图12:TXD引脚上慢上升时间例子
结论
本文介绍的CAN物理层基础和调试举例,应该让您不那么惧怕进入CAN世界了吧。利用本文提供的其他一些参考资料以及相应的数据表,设计人员应该可以马上让其CAN系统正常运行了。

评论