辅助驾驶:汽车环视系统设计,完整硬件平台参考方案

5.3.1 图像拼接的一般方法
1)基于像素的拼接方法。这类方法根据拼接图像的相关函数, Fourier变换等关系式来计算拼接参数口最常见也是最简单的方法就是窗口(模板)匹配法。
(2)基于特征的拼接方法。这类方法是根据需要拼接图像的重要的相同的特征之间的几何关系确定拼接参数,因此这类方法首先需要提取特征,如边缘、角点、线、曲率等。然后建立特征点集之间的对应关系,由此求出匹配参数。
(3)基于模型的拼接方法。这种方法是根据图像失真的数学模型来对图像进行非线性校准的拼接,多用于医学图像。
5.3.2 基于特征曲线的图像拼接
- 图像拼接算法
将带拼接的左、右2幅图像分别记为 、
、 ,宽和高分别为
,宽和高分别为 、
、 和
和 、
、 ,.取图像的左上角作为图像坐标的原点。
,.取图像的左上角作为图像坐标的原点。
对于每幅图像,首先利用Canny算子提取图像的边缘,在每一列的边缘点中找出梯度最大的一点,记录该点的纵坐标。若次列不存在边缘点,则直接找出该列的梯度最大点,对于图像中任意一点 ,梯度值由下式给出:
,梯度值由下式给出:
其中 为点(i,j)的灰度值。这样可得到2个长度分别为
为点(i,j)的灰度值。这样可得到2个长度分别为 和
和 数组和
数组和 ,数组中的兀素是图像中该列梯度最大点的坐标。这2个数组反应了2幅图像中按列最大梯度特征点分布的情况。在确定每列梯度的最大点时,遵循以下的原则:
,数组中的兀素是图像中该列梯度最大点的坐标。这2个数组反应了2幅图像中按列最大梯度特征点分布的情况。在确定每列梯度的最大点时,遵循以下的原则:
(1)当该列中梯度最大值的点有2个或2个以上时,取距离图像水平中线距离最近的点作为该列的特征点。
(2)当2个点距离图像水平中线距离相等时,取上方的点作为该列的特征点。
在图像的采集过程中,相机不会在一个绝对的水平面上运动,倾斜、抖动等现象不可避免。另外,景物中物体的运动和光线的变化也时常发生,这样会使某些列中梯度最大点在2幅图像中有很大出入,数据的抖动性比较大。为消除这种干扰,可以采用中值滤波的方法过滤掉这样的点,使对数组的判断更具可靠性。利用长度为7的一维窗口对2个数组进行中值滤波。
2幅图像有相似的部分,则上面的2个数组中必有一部分,它们的差数组具有很好的稳定性,即差数组的方差具有局部最小的性质,这样就可以找到2幅图像的位置关系。
由于2幅图像的重叠部分一般不超过1/3,为减小计算量,只在左图像的2/3以后的部分和右图像的1/3之前的部分中进行计算,接下来确定全局最小方差的两段子数组。这两段数组的起始位置就是2幅图像的最佳匹配点。
在代表左、右图像的两个数组中分别取一固定长度L的子数组,记为 和
和 。L的选取可视图像的宽度而定,一般L的取为图像宽度的1/10左右会得到较好的效果。
。L的选取可视图像的宽度而定,一般L的取为图像宽度的1/10左右会得到较好的效果。 和
和 的相似程度
的相似程度 由
由 的方差来描述,即
的方差来描述,即
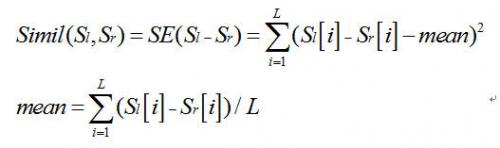
其中方差越小,说明Sl和Sr越相似。那么,必然可以找到这样的 和
和 ,使得:
,使得:

2幅图像的最佳匹配位置就是 和
和 的起始位置。由于
的起始位置。由于 和
和 的元素值是按列梯度最大点的纵坐标取值,在确定了列的匹配位置时,也同时确定了行的匹配位置。这样就可以找到最佳的匹配位置。
的元素值是按列梯度最大点的纵坐标取值,在确定了列的匹配位置时,也同时确定了行的匹配位置。这样就可以找到最佳的匹配位置。
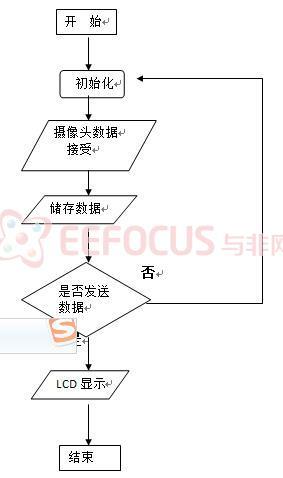
六 软件设计
本项目涉及关键技术有:实时数字图像快速处理;图像传感器技术;图像显示加速;多场景、多视点图像几何处理及其合成拼接成像技术;高性能处理平台设计;车载数字图象技术研究等。软件流程如下图所示。

评论