半导体激光器自动温度控制电路设计

电桥失衡时的输出电压为(将式3代入式4中):

由于当(T0 = 2 9 8 K即2 5℃时),β=3450K时,在激光器一般的工作温度25℃(298K)下,αT = 3.885%%℃。则此时电桥的输出为:Vout = 0.0097 -Vb /ΔT.
3.3仪表放大器
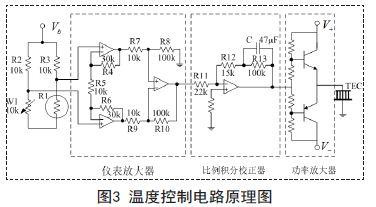
由于电桥输出的信号幅度较小,需要进行放大后再提供给后级使用,仪表放大器具有较高的输入阻抗以及精度,所以常用来对电桥输出电压进行放大,其电路如图3所示。其中取R4=R6,R7=R9,R8=R10,此时增益:

3.4控制器
为了使系统性能指标满足一定的要求,通常需要在系统中引入合适的附加装置,它的作用通常是对系统中的误差信号进行比例、积分、微分等运算,形成适当的控制信号,以获得满意的控制性能。根据设计要求和性能指标,设计了比例-积分(PI)控制器,其原理图如图3所示。
3.5 TEC功率放大器
由于TEC致冷器是一个功率器件(温差较大时驱动电流需要超过1安培以上),因此,温度误差信号经过放大和处理以后需要功率驱动级对其进行驱动[6].TEC功率驱动器是由两个三极管构成的互补型功率放大电路(OCL),原理图如图3所示。其传递函数模型可以理解为一个增益环节。
4.温度控制电路的分析
本设计中采用的比例-积分控制器
根据温度控制电路图可画出其控制系统框图,如图4所示:
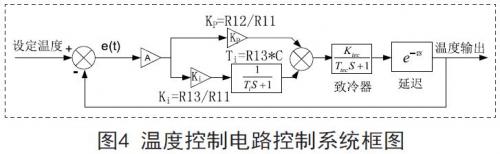
设K =αT* V b* K t e c* A(式中:αT为热敏电阻的温度系数,Vb为电桥电压,Ktec为致冷效率,A为环路中各放大环节的总增益),实验中采用的F U J I T S U激光器,T E C时间常数T t e c= 6 s,延迟时间为100毫秒,致冷效率Ktec=45℃。V,热敏电阻的温度系数αT=0.0097(25℃时),电桥电压2.5V,环路中各放大环节的总增益为A,所以环路总增益K=αT*Vb*Ktec*A=0.0097*2.5*45*7*10=78,Kp=15/22、Ki=100/22,Ti=4.7.系统达到稳态后的环路增益为A(Kp+Ki)=78(15+100)/22=407,此时,系统的稳态误差等于1 /A(Kp+Ki)=0.0024,如果想取得更小的稳态误差,可适当增加Ki以及Ti的值。
5.温度控制电路设计总结
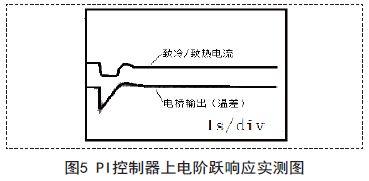
测试中分别采用了比例控制器、积分控制器和比例-积分控制器进行了试验,采用比例控制器系统的响应时间快,但稳定性很难控制;采用积分控制器系统稳定性相对于比例控制器有所提高,但是系统的响应时间将变得非常缓慢;采用比例-积分(PI)控制器系统响应时间有了很大改善,系统的的稳定性较好(图5为PI控制器上电阶跃响应实测图),对于一般的温控系统,这样的动态性能已能满足需求。
对于需要较快速响应的场合,可考虑采用比例-积分-微分(PID)控制器,通过增加微分环节来提高系统的瞬态响应。
另外,考虑到不同厂家不同型号或同一厂家不同型号的激光器在性能参数上都存在差异,以及放大电路的温度漂移、非线性等,这些都对温控电路参数有一定的影响,因此在实际应用中温度控制电路的各个参数需要根据所选用的激光器来选取,并结合仿真以及试验将参数调节到最佳值。

评论