基于AD2S83的角位置检测系统及其在电动助力转向系统中的应用

 |
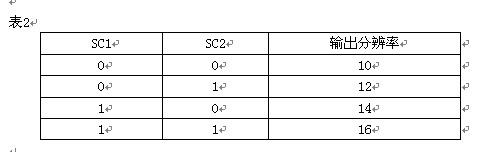
AD2S83的输出分辨率可以通过SC1,SC2 两个管脚的逻辑状态被用户设置为lO,12,14,16位,具体见表2
 |
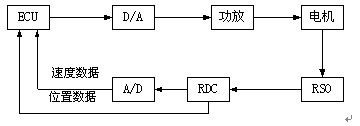
电动助力转向系统必须满足很高的实时性和较高的精度要求,同时要确保其具有高的可靠性。基于无刷旋转变压器与AD2S83集成电路的优点,选用高可靠性的无刷旋转变压器与AD2S83构成这EPS系统角位置检测系统,并以AD2S83的模拟速度输出信号作为速度反馈信号构成EPS系统的速度回路是设计这些EPS系统时较好的选择。系统框图见图2。
5.1位置检测单元硬件电路设计及实现
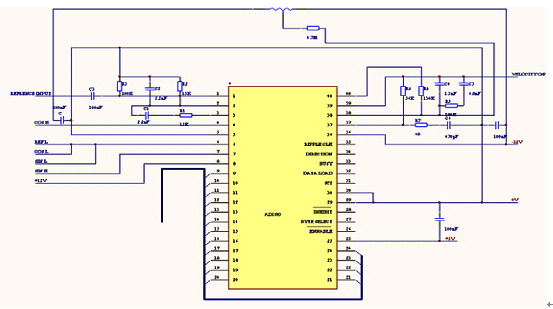
根据系统的性能指标,选择分辨率为12bit,励磁频率为5KHz,最大跟踪频率为260rps,带宽为520Hz。按照上述计算方法选定AD2S83的外围元件后,即可设计出速度反馈与位置检测电路。硬件连接图如下:
 |
5.2 AD2S83与单片机的连接
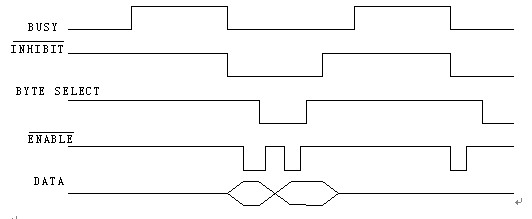
下面介绍单片机对AD2S83 RDC的操作,在此之前先对AD2S83变换器的控制信号加以简单的说明:
BYTESELECT输入:无论该信号的状态如何当
速度信号:速度信号是由积分器输出的与速度成正比的直流信号,在许多情况下可以使用该信号代替传统的测速发动机。
5.3单片机对AD2S83读取数据的过程:
首先对AD2S83施加
 |
本文介绍了AD2S83RDC集成电路的应用,并设计了由该集成电路和旋转变压器构成的EPS系统中位置检测系统,并已成功的应用到市科委在汽车学院的EPS项目当中。经实践表明,该系统具有误差小、实时性好、可靠性高、抗干扰能力强等优点。

评论