基于CAN总线的模糊PID张力控制系统

2.2 模糊PID控制器的实现
2.2.1 隶属函数及模糊PID控制论域值的确定
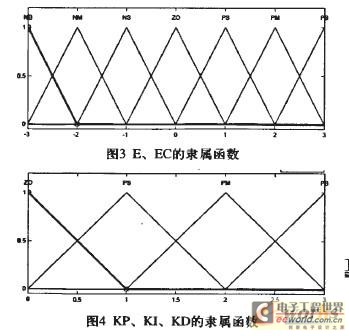
根据被控对象的不同,我们确定隶属函数也不同,通常选择隶属函数的原则是根据被控对象的灵敏度来确定的,窄型隶属函数反应模糊集合具有高分辨率的特性,例如三角型。宽型隶属函数反应模糊集合具有低分辨率的特性,例如梯形。对于张力要求高精度的测量我们选择三角形隶属函数。输入论域值的选取E、EC=[一3、
一2、一l、0、1、2、3],输出论域值的选取KP、KI、KD=[0、0.5、l、1.5、2、2.5、3],语言描述分别为E、EC、为(NB、NM、NS、ZO、PS、PM、PB)七个语言变量。KP、KI、KD的语言描述为(ZO、PS、PM、PB)四个语言变量。隶属函数分别如图3、图4所示。
2.2.2 输入值的模糊化及模糊规则的确定
输入值得模糊化及反模糊化是通过实际被控量的值与选择论域值之间的量化因子及比例因子来确定的。根据不同张力传感器的型号来确定A/D输出值的大小。通用张力传感器模拟量值为O-20mv,最大额定荷重2000KG。根据不同经线强度的要求选择张力值,例如经设定值为1000KG,对应的控制器的单极性数字量最大值为32000,则经过A/D转化后得到的数字量为16000。假设该送经张力的精度要求为20KG,则对应的数字量的实际范围为【一160,160】。则Ke=3/160=0.01875。模糊规则的确定是根据操作者得实践经验得到的,有时也称之为专家控制。模糊PID控制规则如图5所示。
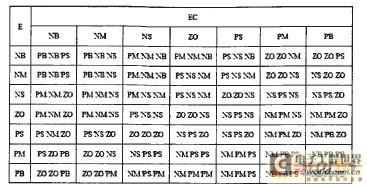
图5 模糊PID控制规则表
3 模糊PID控制器在simulink中的仿真
在simulink中建立模糊PID张力控制系统仿真结构,如图6所示。并通过matlab自带的模糊FIS编辑单元与所建立的隶属函数、规则表进行设置。然后保存为fuzzy_pid.fis文件。Ke=0.01875,Kec=0.0l,控制对象选择某工业常用系统函数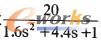 ,在maflab中运行readfis(‘fuzzy_pid’)命令。设置采样时间为0.0Is,步长为10s,输入信号为单位阶跃信号,输出响应函数如图7所示,在系统运行到6s时加入阶跃为0.2的信号,其在经过0.3s后恢复到稳态值。当设定值8000时,系统响应曲线如图8所示。
,在maflab中运行readfis(‘fuzzy_pid’)命令。设置采样时间为0.0Is,步长为10s,输入信号为单位阶跃信号,输出响应函数如图7所示,在系统运行到6s时加入阶跃为0.2的信号,其在经过0.3s后恢复到稳态值。当设定值8000时,系统响应曲线如图8所示。
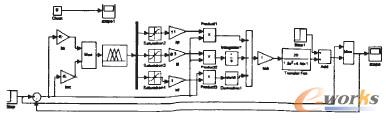
图6 模糊PID张力控制系统仿真结构图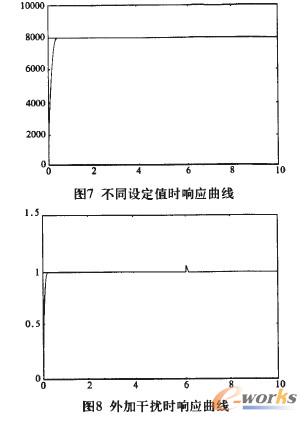
4 结论
该系统设计将CAN总线技术与模糊PID技术相结合,很好的解决了系统由于受外界干扰起的张力超调、系统震荡、不稳定等因素。通过simulink在线仿真实验,证明了该模糊PID张力控制系统具有很好的稳定性、鲁棒性及可靠性等特点。在实际应用过程中,根据所建立的隶属函数与规则,在matlab中通过fuzzy函数建立模糊查询表。通过SH7047高速单片机实现对该系统输出量进行查询。从而实时在线调整PID中KP KI KD各个参数值,达到模糊PID的自适应控制。

评论