新型传感器提升电动机性能并降低功耗

但由于多种原因,非接触式磁性位置传感器现在成为了更好的选择。由于磁性位置传感器的尺寸更小,能够抵御灰尘、油脂、水汽等污染物,因而能够作用于对尺寸和/或可靠性有更高要求的应用。
在过去,有一个对磁性位置传感器不利的趋势:新型无刷直流(BLDC)电动机在总体上有高效率目标,以减少功耗。与此同时,设计者被赋予了增加新电机力矩的任务,实现电机的低转速运行,以支持直接驱动系统。最终,变速器将不再是必需品,这就大大降低了物料成本。
要使得力矩和效率达到最大化,无刷直流电动机在高转速下就必须有一个极其精确的发动机旋转角度数据——利用传统的磁性传感器是很难得到的。现在,新一代产品已经实现了传感器设计的一大突破,它们能够几乎完全精确地测量高转速下的旋转角度。
如何实现角度测量
一个无刷直流电动机包含了一个永磁电动机(转子)和三个或三个以上等距的固定线圈(定子)。通过控制固定线圈中的电流能够形成一个任意方向和大小的磁场。力矩来源于转轴上运行的转子和固定线圈之间的引力和斥力。
当固定线圈磁场与转子磁场相互垂直时,力矩达到最大值。所测量的转子角度反馈到通过固定线圈控制电流的系统(见图1),产生一个垂直磁场。
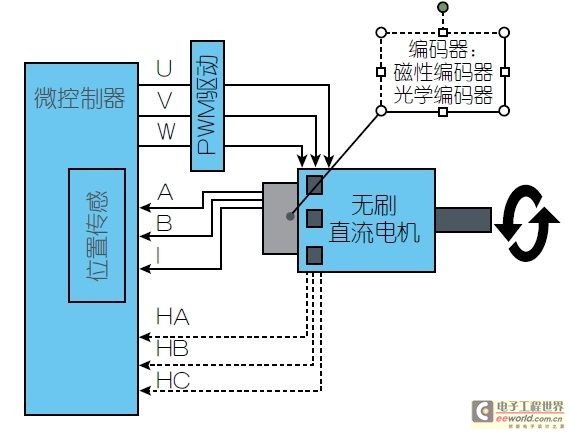
图1:一个无刷直流电机控制系统需要通过磁性位置传感器(通常用于汽车领域)或光学位置
Fig. 2: A PMSM draws on a similar feedback loop to a BLDC motor's.
但是霍尔开关阵列的精确度和准确度常常达不到高性能发动机对力矩和利用率的要求。相反地,磁性编码器(将霍尔传感器集成到硅芯片中的一个半导体)能够产生高精确度、高分辨率的位置数据。它能够对静止状态或低转速下的转轴进行精确的测量。与工业应用常用的光学编码器不同,磁性位置传感器不会受到污染物的影响,且占用空间很小。
另一方面,大多数霍尔传感器芯片有两大缺陷:传输延迟导致的高转速下动态角度误差;在杂散磁场环境下需要屏蔽措施。
这些缺陷会增加系统成本,削弱系统性能。动态角度误差补偿需要很强的处理能力,对杂散磁场中的IC进行额外的保护也会增加硬件的物料成本。
动态角度误差的起因
霍尔传感器芯片连续地抽样读取转轴上磁铁的磁场强度。芯片被安装在一个固定位置,其表面平行于旋转磁铁的表面,芯片和磁铁之间通常有1到2毫米的空隙。
芯片中包含一个信号调节与处理回路,将测量出的磁场强度换算为转子的角度位置(以度数形式)。这一转换所需的时间就是芯片固定的传输延迟(见图2)。不同芯片延迟持续的时间不等,但当今市场上的芯片传输延迟通常在10μs到400μs之间。
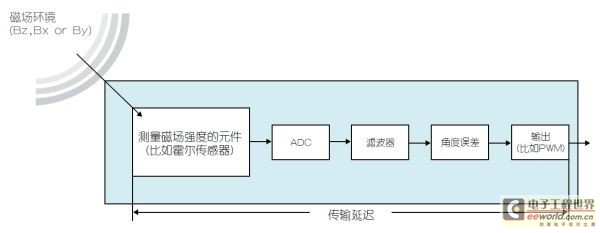
图2:磁性位置传感器中的信号处理导致传输延迟
图3显示了动态角度误差的增加。假设芯片在转子处于红线位置时读取磁场强度,且芯片在转子转动时的传输延迟为100μs。当芯片将磁场强度换算为角度时,转子用100?s的时间转到了蓝线位置——但芯片向ECU或MCU显示转子仍在红线位置。
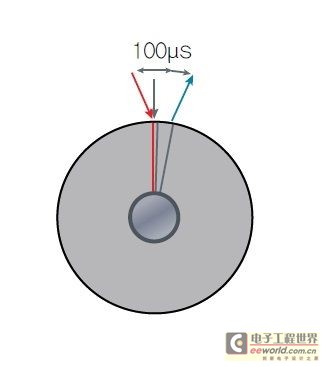
图3:动态角度误差和转速之间的线性关系

评论