软硬结合的智能视觉让机器人行动更灵敏

机器人,这一长期出现在科幻世界和航运产品文档中的事物,被描述为能够帮助人类从呆板、单调和难以忍受的工作中释放出来,并利用其高速度及高精度的特点提升工作效果。无论是可完成吸尘、地毯清洗,甚至排水沟的清洁工作的第一代自主消费机器人系统,或是多种类型的生产环境下机器人的使用正不断增长,都可以说明上述观点(图1)。


图1:为消费者量身定制的自主产品(a)和工业制造系统(b)是众多可以通过视觉处理功能而得到增强的机器人中的一部分。
人类用眼睛(以及感觉)和大脑对其周围的世界进行辨识和定位。从理论上讲,采用摄像头组件、视觉处理器和各种软件算法的机器人系统也应该可以做到。但纵观历史,这样的图像分析技术通常只有在复杂并且昂贵的系统中才能找到。但数字集成电路在成本、性能和功耗方面的进步,为视觉功能使用在多样化和高容量的应用上铺平了道路,其中包括机器人实现的功能越来越多。虽然机器人在功能实现方面仍然面临着诸多挑战,但与以往相比,今天已经可以更加轻松、快速、经济高效地解决这些问题。
软件技术
开发出可根据视觉适应其环境的机器人系统需要采用电脑视觉算法,该算法可将一个或多个图像传感器中的数据转换成该环境的可执行信息。机器人的两个常见任务分别是识别外部目标和方向,并决定机器人的位置和方向。许多机器人可与一个或多个特定目标进行互动。对于情境自适应机器人而言,必须能够检测到那些在未知地点和方向的目标,并且还要了解到这些目标很可能会移动。
摄像头每秒产生上百万像素的数据,从而形成了一个肩负着沉重处理负担的有效载荷。解决该问题的一种常见方法是检测这些多像素的特征,如视频数据每一帧的角、点、边或线(图2)。
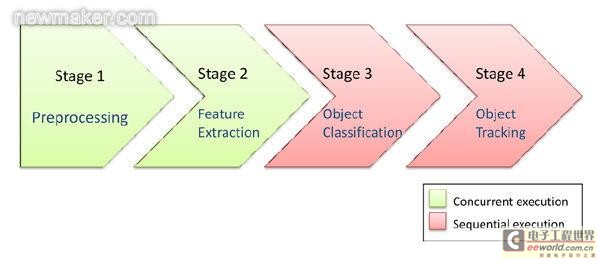
图2:完整处理二维或三维机器人视觉传感器的原始输出涉及四个主要阶段,
每个阶段都有自己的独特性并受其处理要求的制约。

图3:视觉处理器可以集成多种类型的内核,以满足每个处理阶段的独特需求。
通过特征来确定目标方位需要一种像RANSAC (随机抽样和均测)那样的基于统计的算法。该算法采用一组特征来模拟一个潜在的目标方向,然后确定多少其他特征适合该模型。具有最大数量匹配特征的模型对应于被正确识别的目标方向。为了检测移动目标,用户可以将特征识别与跟踪算法相结合。一旦一组特征正确地识别了一个目标, KLT(Kanade-Lucas-Tomasi)或卡尔曼滤波等算法将在视频的帧之间跟踪这些特征的运动轨迹。无论方向和阻塞如何改变,这些技术都是非常可靠的,因为他们仅需要跟踪一组最初特征便可成功。

评论