工业机器人在缝纫机铸件加工中的应用

3.1系统控制逻辑图如图3-1所示:
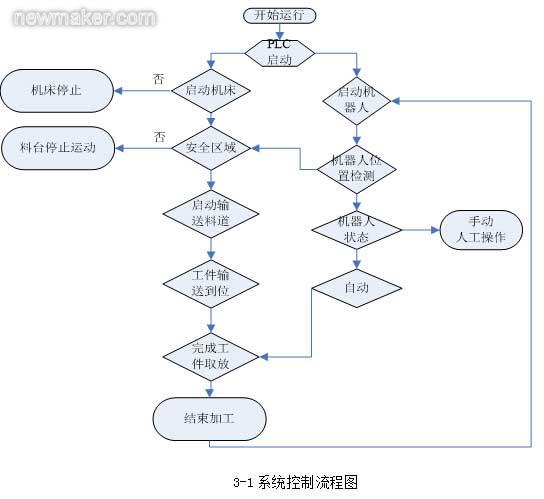
首先,将电控系统上电,启动PLC,PLC控制机器人以及机床进行自检,机床进行自检,如有故障机床将停止。此时机器人检测是否在等待工作位置,如不在工作位置将停机。如机器人以及机床均在指定位置机器人、料道以及机床将进行协调作业,完成一次工作后,将自动进入下月一次循环。
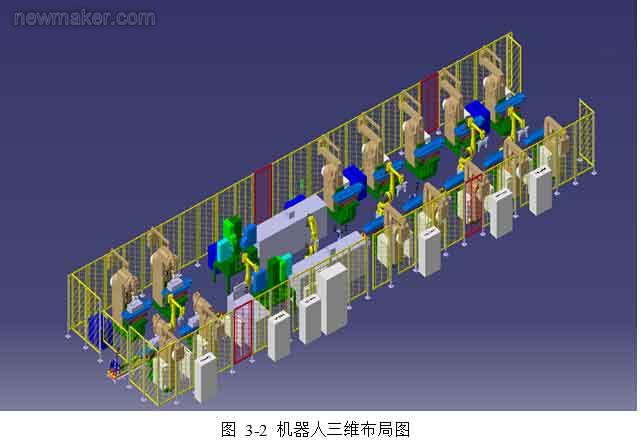
3.4工位仿真布局图:
通过使用Delmia离线仿真软件,对现场机器人进行三维布局。从而验证机器人柔性抓手以及机器人之间是否存在干涉。同时根据仿真结果测算机器人工作节拍,确认机器人底座高度,各个机床摆放位置,验证机器人可达范围,保证机器人与机床之间最大有效服务距离等工作。详细仿真图如图3-2所示:
通过现场对机器人轨迹记录,位姿修改,IO信号设置,完成机器人与机器人的配合。经过初次调试后,优化机器人运动轨迹,删除部分多余运动轨迹点,缩短机器人信号通讯时间,提高机器人工作效率,并通过设置机器人干涉区,防止机器人间以及机器人与机床的潜在碰撞,提高生产线稳定性。当两台机器人存在潜在碰撞危险时,优先出发第一台机器人进入干涉区信号,防止其他机器人进入潜在碰撞区。
总结:通过使用机器人进行缝纫机头上下料,不但可以降低员工劳动强度,还可以提高产量,降低产品在生产过程中存在的潜在风险。使用机器人生产的缝纫机头,不但加工精度得以保障,而且废品率也大幅降低,产品一致性以及质量远远好于人工生产的产品。

评论