鞋类装配生产线现代化--机器人自动化的应用


● 机器人操作末端执行器。在第一种方案中,将一个特定的末端执行器(优化用于将要执行的任务,有时采用多种工具设置布局,设置中将两个工具安装在相同的末端执行器上)固定到机器人腕部,将需要加工的鞋类安装到特殊支撑件上(在机器人是自动化系统的一部件时,一般为传输鞋类的托盘)并在机器人执行加工任务时将鞋类可靠固定在位。
● 机器人操作鞋类。在这种替代方案中,将一个特殊的夹紧机构安装到机器人腕部;使用夹子从空间内的给定位置(鞋类通常安装在托盘上并在机器人前部传输)抓紧鞋类(或者最好通过安装在其上的金属连接板抓紧鞋楦)并将鞋类移动到一个或多个活动工作站(每个工作站执行一项特定任务或一部分任务)。在此情况下,机器人也必须跟随采用与前一种情况相似的方式编程的预定义轨迹移动(需要执行的每项特定任务或分任务的轨迹)。
● 机器人仅执行拾取和放置操作,这可能是最“创新”的方案,因此缺少这一方面的实施示例(这种现象并不奇怪)。在此情况下,机器人不在鞋类上执行任何“活动”任务,而是将需要加工的鞋类从一个工位“搬运”到另一个工位;这可能是可以使用机器人的最“人神一体”方式,意即机器人执行的任务与操作员执行的任务(从传送器上拾取鞋类并放入任何类型的自动化机器或者使鞋类从一台机器传送到另一台机器)十分相似。这些操作就是典型的拾取和放置任务,属于机器人的典型操作领域,我们可以全面利用它的灵敏度和速度。传送器与机器或者机器与机器甚至是人机任务,就是在制鞋机器人的这种最后场景中我们可以想象的任务。


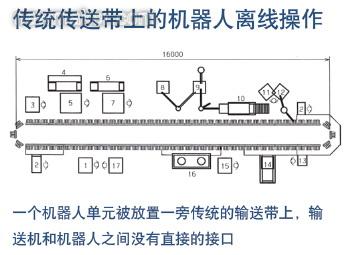
评论