通过无传感器FOC控制提高电器电机控制的效率和成本效益

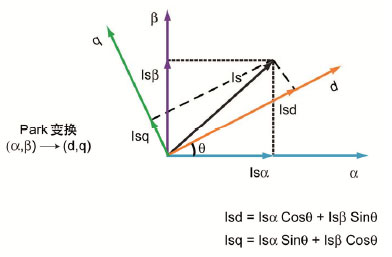
图3 Park变换
当正弦输入电流施加到定子上时,会产生旋转磁通。转子的速度与旋转磁通矢量直接相关。磁通矢量必须始终与转子磁极保持对齐,以使电机产生最大的转矩。
图4给出了整个过程的图示,包括坐标变换、PI迭代、逆变换和产生PWM,还描述了FOC控制所需的功能。误差信号根据Id、Iq和各自的参考值而产生。Id参考电流控制转子磁通。请记住,只有在负载稳定的条件下,Id和Iq(代表转矩和磁通)才具有时间不变性。Iq参考电流控制电机的转矩输出。PI控制器的输出提供Vd和Vq,它们构成发送到电机的电压矢量。新的变换角根据由Park逆变换产生的电压和由Park变换产生的电流进行估计。
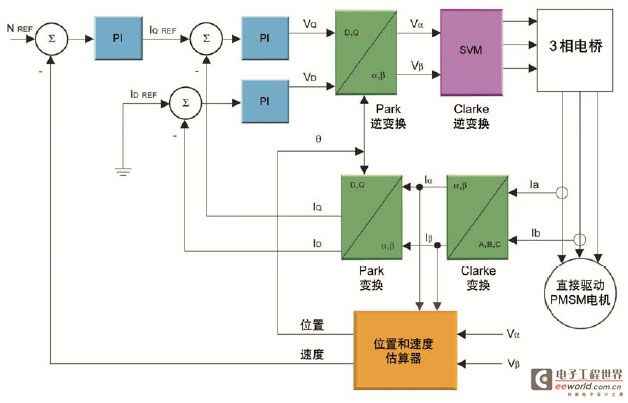
图4 采用无传感器FOC算法控制的直接驱动洗衣机PMSM电机的应用框图
FOC算法使用新的变换角来确定下一个电压矢量的位置。通过使用新的变换角,PI控制器的Vd和Vq输出值被旋转变换到静止参考坐标系。该计算产生正交电压值vα和vβ。下一步,对vα和vβ值进行逆变换,得到三相值va、vb和vc。三相电压值用于计算新的PWM占空比值,产生所需的电压矢量。
在FOC算法中,三相分离的PWM信号使用空间矢量调制(SVM)进行正弦波调制,并施加到电机的三相绕组。通过使用分流电阻,可以监视每个绕组中的电流,并将电流与基于电机特性的电气模型进行比较。电机供应商会提供电机的绕组特性,虽然它们也可以使用绕组的电感和电阻值进行测量。转子位置通过基于电机模型间接测量反电动势(EMF)来计算。通过推导等于测量电流的估算电流,可以基于电机模型计算得到反电动势。
采用FOC方法可以为PMSM电机功率管理带来许多好处。例如,FOC可以改善PMSM电机的动态响应,为诸如洗衣机之类需要快速响应速度变化(洗涤和甩干过程中)的电器带来好处。FOC支持以较低的电流产生最佳的转矩,因为它可以控制电流的幅值和相位,并使定子和转子磁场之间的角度保持90°。此外,由于FOC支持在每个PWM周期中控制电机电流,所以可以从根本上限制电流。

评论