基于TMS320F2812的太阳跟踪器系统设计

太阳能是一种无污染、无噪声、无公害的可再生能源,目前开发利用太阳能的方式很多,光伏发电是其中一种主要的利用方式。所谓光伏,是以太阳能电池为媒介,将太阳光直接转化为电能的过程。我国目前采用的光伏发电电池以普通单晶硅多晶硅为主,转换效率较低;聚光电池转换效率较高,但需要跟踪精度较高的太阳跟踪器,时时刻刻跟踪太阳,使太阳光线与集光板垂直,利用图1所示的菲涅耳透镜使光线汇聚在聚光器的聚光电池上,提高能量密度,从而提高发电效率。

1 太阳跟踪器跟踪原理
目前国内外的太阳跟踪器按跟踪原理分为:传感器检测的主动跟踪原理和太阳位置计算的被动跟踪原理。本文将两种原理相结合设计了基于TI公司的DSP芯片TMS320F2812的太阳跟踪控制器。
1.1 传感器检测的原理
利用硅光电池的光电效应,在太阳能集光板上高度和方位方向各放置两个长方形的硅光电池板,阳光通过通光筒照射在硅光电池板上,如图2所示。
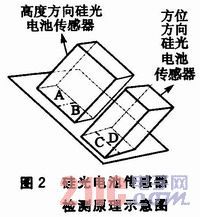
高度方向硅光电池被分为A、B两个区域,方位方向硅光电池被分为C、D两个区域。通过电压比较电路可分别计算出它们之间的电压差: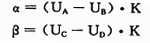
其中,UA、UB、UC、UD为A、B、C、D各点的电压,K为标定系数,由此可在一定范围内检测角度偏差,从而确定运动方向和角度变化大小。
1.2 太阳位置计算的原理
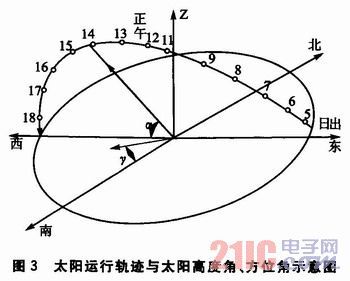
太阳在天球上的位置可由太阳高度角和太阳方位角来确定。地球上观测点同太阳中心连线与地平面的夹角,称为太阳高度角;地球上观测点同太阳中心连线在地平面上的投影与正南方向之间的夹角,称为太阳方位角。太阳运行轨迹与太阳高度角α、方位角γ的关系如图3所示。
要计算α和γ,可以采用以下计算方法:
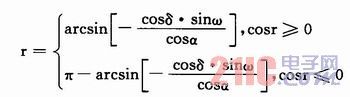
δ为太阳赤位角,ω为太阳时角,φ为当地的纬度。对于δ和ω这两个参数的精确计算要满足高精度跟踪的需求,并根据实际情况来不断修正;同时,还需要结合传感器检测的原理加以修正。采用TMS320F2812做主处理器,根据硬件时钟提供的日历时间计算出太阳的高度角和方位角,进而控制电机转动方向和角度,由传动机构带动支架转动精确地跟踪太阳。

评论