CAN学习手记一

九、CAN的报文格式:
(关于这部分内容,对于我下一步要进行编程实验控制CAN总线是很重要的一个知识点。很郁闷的是搜了老半天只看见有文字叙述这部分内容的,不仅说得不系统完整,而且远没有贴图说明来的具体直观。不过还好,搜到了一份E文版的CAN总线资料,再把这个资料详细看了下,再做了整理,还是用图来说明CAN传输的报文格式比较容易理解。老外写的东西确实比国内的好,这个不是我吹出来的,有兴趣下了看看就知道了,见附件下载。)
CAN通信是一种点对多点的传输协议,不是基于地址的传统的点对点传输协议。当一个点传输数据时,总线上的其它点都可以为接受方,它们可以通过ID来作出对总线上传送数据的处理(接收或者丢弃)。并且当数据被正确接收到以后,接收方便会作出应答响应。CAN协议还有一个很实用的功能,就是总线上的任一个节点可以请求其它节点向其发送数据,这被称作远程发送请求(RTR)。除此以外,CAN协议还有一个优点,当总线新加入一个节点进行通信时无需更改原有的程序,新节点只要通过ID就可以知道是接收还是丢弃数据。
CAN协议定义了四种不同的帧。
1、数据帧,这个帧被用于当一个节点把信息传送给系统的任何其它节点。数据帧由7个不同的位场组成,即帧起始、仲裁场、控制场、数据场、CRC场、应答场、帧结束。
2、远程帧,此帧是基于数据帧格式,只要把RTR位设置成远程发送请求(Remote Transmit Request),并且没有数据场。总线上发送此帧后,表示请求接收与该帧ID相符的数据帧。远程帧由6个不同的位场组成,即帧起始、仲裁场、控制场、CRC场、应答场、帧结束。
3、错误帧,任何单元监测到错误时就发送错误帧。错误帧由两个不同的场组成。第一个场是错误标志,用做为不同站提供错误标志的叠加;第二个场是错误界定符。
4、超载帧,节点需要增加时间来处理接收到的数据时便发送过载帧。超载帧包括两个位场:超载标志和超载界定符。
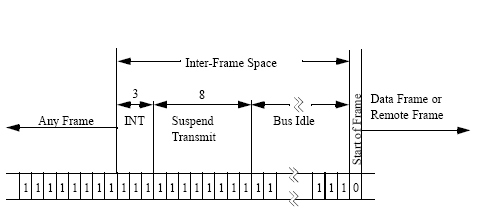
图1 帧起始位
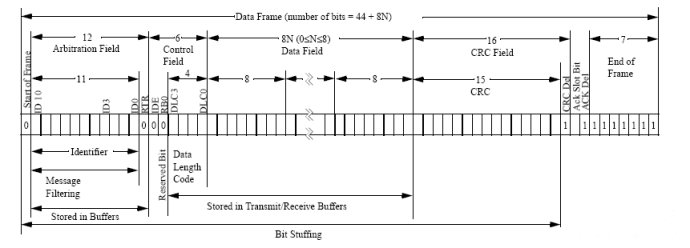
图2 标准数据帧格式
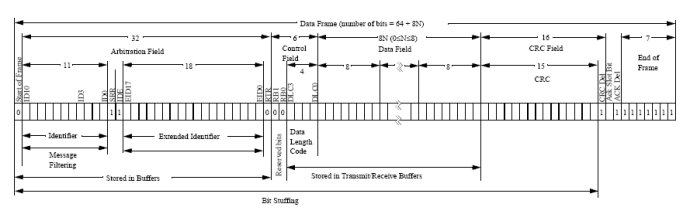
图3 扩展数据帧格式
由图2和图3可以看到数据帧的两种不同格式,两种格式的差别只是它们的ID位数不同。
1、帧起始。
2、仲裁场,仲裁场包括标识符和远程发送请求位(RTR)。
3、控制场,控制场由6个位组成,说明数据帧中有效数据的长度。标准帧的最高位是IDE位,扩展帧的最高位是保留位RB1,它们的次高位都是保留位RB0。低四位是DLC(Data Length Code)位,标识传送的数据字节数(0-8字节)。
4、数据场,数据场由数据帧中的发送数据组成。它可以为0-8个字节。
5、CRC场,CRC场包括CRC序列,这部分由SJA1000控制芯片完成。
6、应答场,应答场长度为两个位,包括应答间隙和应答界定符。由SJA1000控制芯片自动完成。
7、帧结束,每一个数据帧和远程帧均由一标志序列界定,这个标志序列由7个“隐性”位组成。这部分由SJA1000控制芯片自动完成。
仲裁场、控制场、数据场由软件编程配置SJA1000完成;帧起始、CRC场、应答场、帧结束由CAN总线控制芯片SJA1000自动完成。
十、CAN的数据错误检测:
不同于其它总线,CAN协议不能使用应答信息。事实上,它可以将发生的任何错误用信号发出。CAN协议可使用五种检查错误的方法,其中前三种为基于报文内容检查。
1、循环冗余检查(CRC)
在一帧报文中加入冗余检查位可保证报文正确。接收站通过CRC可判断报文是否有错。
2、帧检查
这种方法通过位场检查帧的格式和大小来确定报文的正确性,用于检查格式上的错误。
3、应答错误
如前所述,被接收到的帧由接收站通过明确的应答来确认。如果发送站未收到应答,那么表明接收站发现帧中有错误,也就是说,ACK场已损坏或网络中的报文无站接收。CAN协议也可通过位检查的方法探测错误。
4、总线检测
有时,CAN中的一个节点可监测自己发出的信号。因此,发送报文的站可以观测总线电平并探测发送位和接收位的差异。
5、位填充
一帧报文中的每一位都由不归零码表示,可保证位编码的最大效率。然而,如果在一帧报文中有太多相同电平的位,就有可能失去同步。为保证同步,同步沿用位填充产生。在五个连续相等位后,发送站自动插入一个与之互补的补码位;接收时,这个填充位被自动丢掉。例如,五个连续的低电平位后,CAN自动插入一个高电平位。CAN通过这种编码规则检查错误,如果在一帧报文中有6个相同位,CAN就知道发生了错误。
如果至少有一个站通过以上方法探测到一个或多个错误,它将发送出错标志终止当前的发送。这可以阻止其它站接收错误的报文,并保证网络上报文的一致性。当大量发送数据被终止后,发送站会自动地重新发送数据。作为规则,在探测到错误后23个位周期内重新开始发送。在特殊场合,系统的恢复时间为31个位周期。
但这种方法存在一个问题,即一个发生错误的站将导致所有数据被终止,其中也包括正确的数据。因此,如果不采取自监测措施,总线系统应采用模块化设计。为此,CAN协议提供一种将偶然错误从永久错误和局部站失败中区别出来的办法。这种方法可以通过对出错站统计评估来确定一个站本身的错误并进入一种不会对其它站产生不良影响的运行方法来实现,即站可以通过关闭自己来阻止正常数据因被错误地当成不正确的数据而被终止。
6、CAN可靠性
为防止汽车在使用寿命期内由于数据交换错误而对司机造成危险,汽车的安全系统要求数据传输具有较高的安全性。如果数据传输的可靠性足够高,或者残留下来的数据错误足够低的话,这一目标不难实现。从总线系统数据的角度看,可靠性可以理解为,对传输过程产生的数据错误的识别能力。
残余数据错误的概率可以通过对数据传输可靠性的统计测量获得。它描述了传送数据被破坏和这种破坏不能被探测出来的概率。残余数据错误概率必须非常小,使其在系统整个寿命周期内,按平均统计时几乎检测不到。计算残余错误概率要求能够对数据错误进行分类 ,并且数据传输路径可由一模型描述。如果要确定CAN的残余错误概率,我们可将残留错误的概率作为具有80~90位的报文传送时位错误概率的函数,并假定这个系统中有5~10个站,并且错误率为1/1000,那么最大位错误概率为10—13数量级。例如,CAN网络的数据传输率最大为1Mbps,如果数据传输能力仅使用50%,那么对于一个工作寿命4000小时、平均报文长度为 80位的系统,所传送的数据总量为9×1010。在系统运行寿命期内,不可检测的传输错误的统计平均小于10—2量级。换句话说,一个系统按每年365 天,每天工作8小时,每秒错误率为0. 7计算,那么按统计平均,每1000年才会发生一个不可检测的错误。

评论