单目视觉车道偏离报警系统

当车道检测出来以后,需要根据车道信息判断车辆在车道中的位置,因此车道偏离决策算法也是车道偏离报警系统的关键,它主要是确定一个合适的预警量向驾驶员提供报警,能够保证及时和准确报警,同时不会对驾驶员造成过多的干扰。目前常用的偏离决策算法都需要对相机进行标定(如TLC方法),增加了系统的复杂性,并给安装带来不便。本系统采用的车道夹角法,不需要对相机进行标定,安装时 保持相机与车辆平行即可。如果车辆的左右车道夹角之和超过某一设定阈值,则认为车辆偏离正常车道,系统根据当前行使状况综合判断驾驶员是否无意识偏离了行车道,并发出报警,提醒驾驶员纠正行车路线。图4为车道偏离算法流程图。
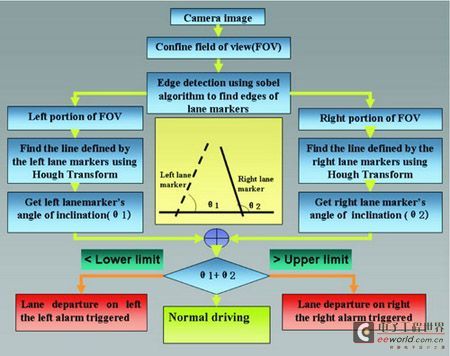
图4车道偏离算法流程图
五、仿真结果与分析
图5(a)为车辆位于车道中心附近行驶,(b)为车辆位于车道偏左行驶,(c)为车辆位于车道偏右行驶,(d)(e)(f)分别为(c)(b)(c)所示行使状态下的控制台显示界面。如(d)所示,当车辆位于车道中心附近行使时,车道偏移量的值在0值附近摆动,表示车辆并未发生偏离,此时偏离报警灯也未点亮。如(e)所示,当车辆无意识行驶到车道左边时,车道偏移量在-20到-30之间摆动,此时左偏报警灯闪亮,同时发出较低频率的蜂鸣报警声,表示车辆向左偏离。当车辆偏向右边车道时如(c)所示;偏移量的值在20到30之间变化,右偏报警灯闪亮,并发出较高频率的蜂鸣报警声,如图(f)所示。
车辆在虚线道路上行驶的情况如图6所示,(b)表示车道偏离量在0值附近变化,说明车辆没有发生偏离,(c)为车辆左偏时的偏离量的值,其值在-20附近变化 ,(d)为车辆右偏时的偏离量值,其值在-20到-30之间变化。
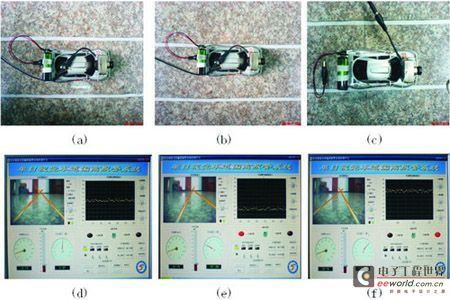
图5车辆在实线车道上行驶的实验结果
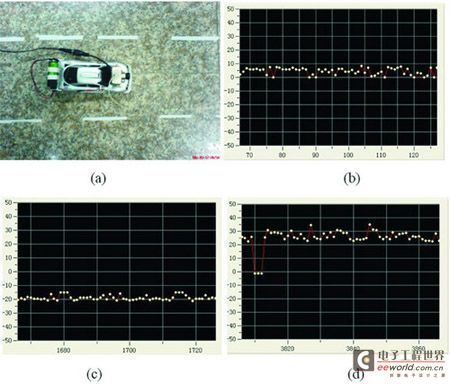
图6
从以上模型车辆的实验结果可以看出,系统能够较好地适应不同线型的车道线,并能在模型车辆偏离时做出正确的判断,发出不同的报警提示,达到了设计要求。

评论