比较简单的AVR单片机超声波测距的实例

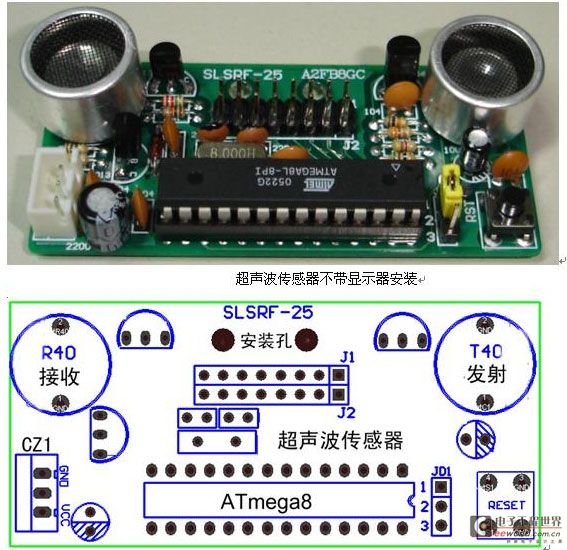
短路插针JD1-2/-3脚功能接地;JD1-1接PC5;短路块插于2,3间,使用LED数码管显示;短路块插于1,2间,使用LED发光二极管显示,或超声波传感器输出分段控制信号。超声波传感器输出分段控制信号对应J1引脚:
1、J1-1—PD0避障距离范围5~9cm
2:J1-2—PD1避障距离范围10~19cm
3:J1-3—PD2避障距离范围20~29cm
4:J1-4—PD3避障距离范围30~39cm
5:J1-5—PD4避障距离范围40~49cm
6:J1-6—PD5避障距离范围50~99cm
7:J1-7—PD6避障距离范围100~179cm
8:J1-8—PD7避障距离范围180~250cm
1、J1-1—PD0避障距离范围5~9cm
2:J1-2—PD1避障距离范围10~19cm
3:J1-3—PD2避障距离范围20~29cm
4:J1-4—PD3避障距离范围30~39cm
5:J1-5—PD4避障距离范围40~49cm
6:J1-6—PD5避障距离范围50~99cm
7:J1-7—PD6避障距离范围100~179cm
8:J1-8—PD7避障距离范围180~250cm
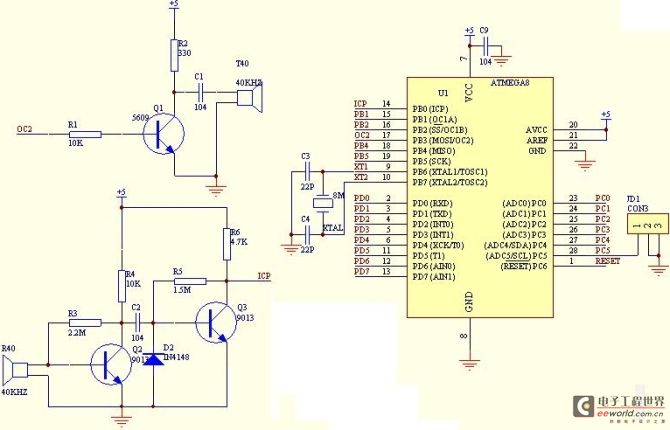
SLSRF-25电原理图
SL-SRF-25超声波测距源程序:
/*********************************************************************
Project:超声波测距
Chiptype:ATMEGA8
Clockfrequency:8.000000MHz
*********************************************************************/
#include
#include
#pragmainterrupt_handlerintt0:10//T0溢出中断
#pragmainterrupt_handlericp_timer1:6//T1捕捉中断
#pragmadata:code//设定数据区为程序存储器
constunsignedchartab1[]={0X28,0XEE,0X32,0XA2,0XE4,
0XA1,0X21,0XEA,0X20,0XA0};//七段译码字型表(lm,cm)
constunsignedchartab2[]={0X08,0XCE,0X12,0X82,0XC4,
0X81,0X01,0XCA,0X00,0X80};//七段译码字型表(m)
#pragmadata:data//设定数据区回到数据存储器
unsignedcharledbuff[]={0X08,0X28,0X28};//显示缓冲区
unsignedcharcount;
unsignedcharnewcount;
unsignedcharoldcount;
voidintt0(void)//T0中断定时程序,定时58US,即测距1CM.
{
TCNT0=0XC6;
count++;
}
voidicp_timer1(void)//ICP1捕捉中断,捕捉频率38.5~41.6
{
if(96<=ICR1<=104)
{
SREG&=0X7f;
newcount=count-13;
ICR1=0;
TCNT1=0;
TCCR1B=0X81;
}
}
voiddelay_1us(void)//1us
{
asm("nop");
}
voiddelay_us(unsignedintt)//tus
{
unsignedinti=0;
for(i=0;i
}
voiddelay_1ms(void)//1ms
{
unsignedinti;
for(i=1;i<1142;i++);
}
voiddelay_ms(unsignedchart)
{
unsignedchari=0;
for(i=0;i
delay_1ms();
}
}
/*********************************************************************
Project:超声波测距
Chiptype:ATMEGA8
Clockfrequency:8.000000MHz
*********************************************************************/
#include
#include
#pragmainterrupt_handlerintt0:10//T0溢出中断
#pragmainterrupt_handlericp_timer1:6//T1捕捉中断
#pragmadata:code//设定数据区为程序存储器
constunsignedchartab1[]={0X28,0XEE,0X32,0XA2,0XE4,
0XA1,0X21,0XEA,0X20,0XA0};//七段译码字型表(lm,cm)
constunsignedchartab2[]={0X08,0XCE,0X12,0X82,0XC4,
0X81,0X01,0XCA,0X00,0X80};//七段译码字型表(m)
#pragmadata:data//设定数据区回到数据存储器
unsignedcharledbuff[]={0X08,0X28,0X28};//显示缓冲区
unsignedcharcount;
unsignedcharnewcount;
unsignedcharoldcount;
voidintt0(void)//T0中断定时程序,定时58US,即测距1CM.
{
TCNT0=0XC6;
count++;
}
voidicp_timer1(void)//ICP1捕捉中断,捕捉频率38.5~41.6
{
if(96<=ICR1<=104)
{
SREG&=0X7f;
newcount=count-13;
ICR1=0;
TCNT1=0;
TCCR1B=0X81;
}
}
voiddelay_1us(void)//1us
{
asm("nop");
}
voiddelay_us(unsignedintt)//tus
{
unsignedinti=0;
for(i=0;i
}
voiddelay_1ms(void)//1ms
{
unsignedinti;
for(i=1;i<1142;i++);
}
voiddelay_ms(unsignedchart)
{
unsignedchari=0;
for(i=0;i
delay_1ms();
}
}

关键词:
AVR单片机超声波测
评论