全球主流8位MCU芯片详细解剖No.3:微芯 PIC16F877

PIC16F877基本电路
PIC振荡频率电路
单片机振荡电路与整体系统工作速度有直接的关系,例如同步∕异步串行传输、定时器等,都与振荡频率有关,不同系列单片机有不同振荡频率,根据产品资料手册,PIC16F877振荡频率最高可到20MHz;在图1中,振荡电路接于Pin13(OSC1/CLKIN)与Pin14(OSC2/CLKOUT),而振荡电路有以下四种形式:
LP:使用低功率振荡晶体(Low Power Crystal)
XT:使用振荡器∕谐振器(Crystal/Resonator)
HS:使用高速振荡器(High Speed Crystal/Resonator)
RC:使用电阻∕电容(Resister/Capacitor)
一般常用振荡晶体或是谐振器作为单片机振荡源,外接电路及PIC内部电路说明如图6所示。图中电容C1与C2规格大小是根据Crystal或Resonator而有所不同,表1列出电容建议值,使用其它振荡源的电路说明请参考产品资料手册。
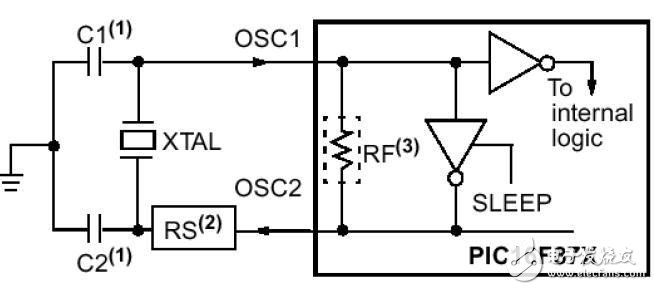
图6. 振荡源电路图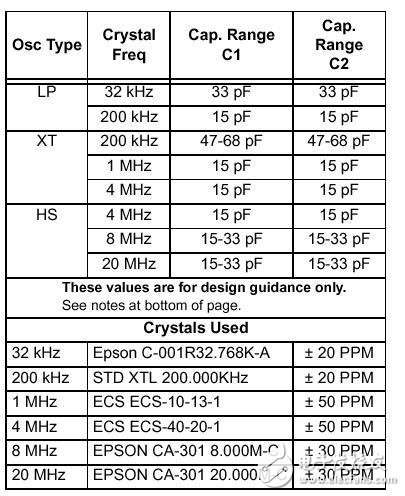
表1. 建议电容值
外加电源与重置电路
PIC16F877的工作电压为5V,连接Pin11与Pin32,Pin12与Pin31为地线接脚;重置电路连接Pin1,按下Reset后,内部指令重头开始执行,系统重新运作。
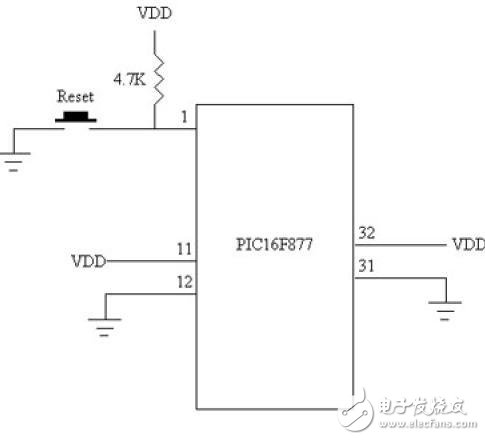
图7. 电源与重置电路
输入输出接口
PIC16F877除了上述基本电路所占用的7支接脚外,其余的33支接脚都可当成输出、输入接脚,输入输出端口是单片机基本界面,可以与周边电路进行电路控制和信号传输与检测。PIC是8位的单片机,以接脚特性分组,每组尽量凑满8支接脚,并将I/O命名为PORTA(RA0~RA5)、PORTB(RB0~RB7)、PORTC(RC0~RC7)、PORTD(RD0~RD7)和PORTE(RE0~RE2)等,各分组接口特性说明如下:
PORTA
PIC16F877的PORTA总共有6个位(RA0~RA5),PORTA的接脚可作为数字输出输入端口,而系统重置后,PORTA自动成为模拟输入状态,可读取模拟输入讯号。
PORTB
PORTB总共有8个位(RB0~RB7),可以撰写程序规划输入输出方向、状态,其中,要进行烧录时,使用到三支接脚,分别是Pin36(RB3/PGM)、Pin39(RB6/PGC)与Pin40(RB7/PGD)。
PORTC
PORTC总共有8个位(RC0~RC7),除了可作为数位I/O外,还和一些特殊功能的周边电路共享接脚,例如CCP(直流马达控制)、I2C、SPI(同步串行通讯电路)、UART(异步串行传输电路)等等。
PORTD
PORTD总共有8个位(RD0~RD7),可作一般数字I/O,并与PSP(Parallel Slave Port)并列传输接口共享。当整体系统需要多单片机时,彼此可以经由并列传输接口来快速传输资料。
PORTE
PORTE总共有3个位(RE0~RE2),PORTE的Pin8、9、10有三种功能,除了基本I/O功能,也有模拟输入功能,而上述PORTD的并列传输接口设定所需的控制接脚,如/RD、/WR、/CS等,也是属于PORTE接脚。
PIC16F877指令简介
PIC16F877常用的语言有汇编语言与C语言两种,汇编语言是将每一个机器码使用一个文字代号代表,比较接近处理器真正动作模式;而C语言是比较符合人们的使用习惯,事先将汇编语言组合成C语言形式,使用较为方便,但是C语言所组译的机器码程序通常比较大,且组译软件通常需要额外购买。以下简介汇编语言相关指令与一套C语言组译软件。
PIC16F877指令摘要
PIC是采用RISC(Reduced Instruction Set Computing,精简指令集),与8051系列采用的CISC(Complicated Instruction Set Computing,复杂指令集)不同,PIC16F877所有指令指有35个,8051高达111个指令。
汽车电动助力转向系统
1 引言
随着电子控制技术的发展及其在汽车领域的广泛应用, 电动助力转向系统(Electric Power Steering, 简称EPS)越来越成为目前汽车电子技术研究的热点之一。与传统的转向系统相比,EPS系统结构简单,灵活性大,可以获得理想的操纵稳定性,能动态地适应汽车行驶状况的变化,在操纵舒适性、安全性、环保、节能、易于维修等方面也充分显示了其优越性[1]。目前, 电动助力转向已部分取代液压助力转向并获得广泛应用,如日本的大发、三菱、本田汽车公司,美国的Delphi汽车系统公司,德国的ZF公司等都相继研制出各自的EPS并装配使用。国内对EPS 系统的研究起步较晚,仅有清华、华中科大、吉林大学、合肥工大等高校开展了系统结构的方案设计、系统建模和动力学分析等研究,但处在理论探索、实验研究阶段。国内部分汽车厂商如重庆长安、南昌昌河、东风、一汽等与高校联合研究,也都处在研制的初级阶段,未达到实用程度[2]。
2 EPS系统的硬件组成及工作原理
2.1 EPS的硬件组成
EPS是一种直接依靠电力提供辅助扭矩的动力转向系统,结构如图2-1所示,它由电子控制单元(ECU)控制电机提供助力,系统主要由电子控制单元、扭矩传感器、转角传感器、车速传感器(可与其他系统共用)、直流电机、离合器、电磁继电器、减速机构和转向机构等组成。
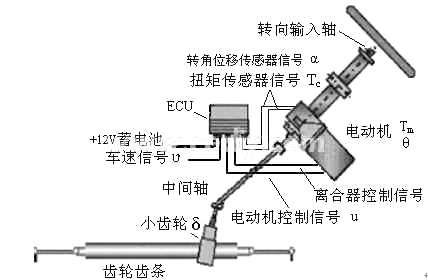
图2-1 EPS系统结构图
2.2 EPS的工作原理
当汽车点火开关闭合时,ECU上电开始对EPS系统进行自检,自检通过后,闭合继电器和离合器,EPS系统便开始工作,当方向盘转动时,位于转向轴上的转角传感器和扭矩传感器把测得方向盘上的角位移和作用于其上的力矩传递给ECU,ECU根据这两个信号并结合车速等信息,控制电机产生相应的助力,实现在全速范围内最佳控制:在低速行驶时,减轻转向力,保证汽车转向灵活、轻便,在高速行驶时,适当增加阻尼控制,保证转向盘操作稳重、可靠。

评论