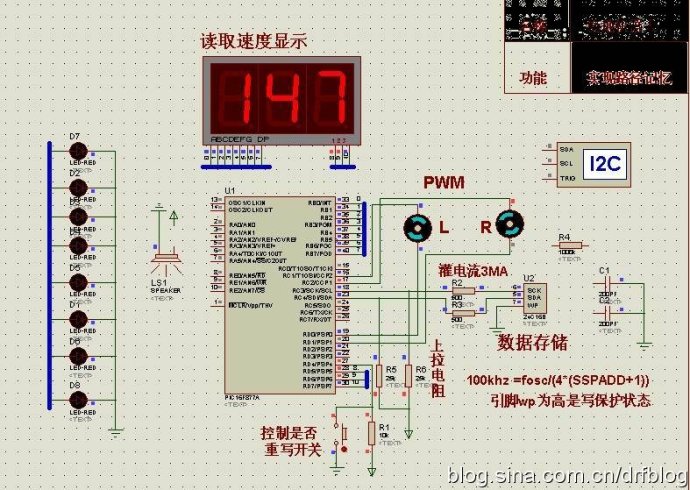
利用24CXXX系列E2PRAM存储器实现机器人的路径记忆。 首先,利用PIC16F877A单片机将机器人的路径采集转换成数据,单片机进行处理。但是,由于单片机RAM太小不能够存储大量的数据。因此,这里用24CXXX系列的存储器存储大量的数据,单片机实现的是对数据的采集和处理。
本文引用地址:https://www.eepw.com.cn/article/201611/321068.htm 此过程用的是PIC16F877A单片机的I2C协议。
具体I2C使用如下:
1.写过程
(1)上电后等待一个延时(1ms)。
(2)器件寻址,给一个起始信号(SCL为高电平时SDA给一个下降沿)。发送从器件地址,高5位为10110,然后根据A1/A0(如果和器件的地址相同则那个器件会应答)进行读/写控制(O为读)。
(3)应答,器件在SCL的第9个周期时SDA给出一个低电平,作为应答信号。
(4)开始写有两种模式:字节写模式和页写模式。
·字节模式:给出A15~A8应答,给出A7~A0应答;然后给出DATA和停止信号 (SCL为高电平时,SDA给出一个上升沿),接着要等待一个擦写时间。
·页写模式:给出地址以后连续给出64个数据。如果多于64个数据,则地址计数器自动翻转。(如果少于64昵,估计是没有问题的,但是需要实验验证。)
(5)判断擦写操作是否完毕的一个方法(应答查询),如果器件还处于擦写状态,则不会应答器件寻址;如果有应答,则说明擦写完毕。
2.读过程
(1)上电以后等待一个延时(lms)。
(2)器件寻址。
(3)应答。
(4)开始读有三种模式:立即当前地址读、选择/随机读、连续读。
·立即当前地址读:如果上次读/写的操作地址为N,则现在是N+1。不需要ACK,但是需要Stop信号。
·选择/随机读:先伪写(用于给出一个地址),然后再次启动,读取数据。
·连续读:读取一个以后给一个应答,这样器件会再给出下一个地址的数据内容。
(5)开始数据传输Start后、停止数据传输Stop前,SCL高电平期间,SDA上为有效数据。
最终实现的效果
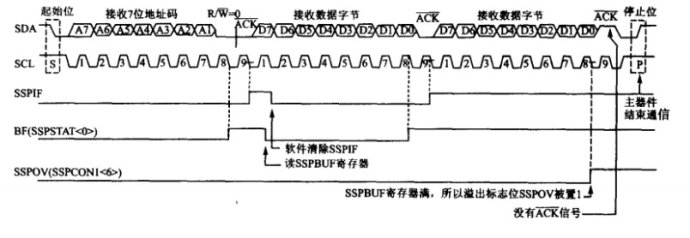
I2C模式7位寻址数据接收过程时序图


评论