油罐车的导航与监测系统系统

3.5、 疲劳驾驶报警、超速报警
为确保行车安全,监控中心可以控制司机连续驾驶车辆的时间,如果司机连续驾驶超过监控中心限制的驾驶时间,车载终端将自动向中心发送一条疲劳驾驶报警,监控中心可以提示司机注意休息、注意行车安全。当油罐车辆超出监控中心设定的速度,GPS车载终端会向监控中心通报。
方案:
疲劳驾驶:判断发电机是否工作,发电机工作时电瓶发电,电瓶发电时,计时器1开始计时,当工作超过10小时则发送疲劳驾驶警告,计时器1清零的条件是:电瓶连续1小时工作(使用计时器2计算这1小时)。
超速报警:超速通过GPS速度判断达成。
3.6、车载设备检测功能
车载终端在网络覆盖的情况下,12小时至少向中心上报一次定位及状态信息。据此,中心可对车载终端的运行状况、故障信息进行统计。
方案:
每天0:00和12:00,额外向监控中心上报车辆信息。
3.7、 历史资料检索与历史轨迹回放
可随时查询某辆车的位置回报记录、某段时间接收的车辆位置回报信息、某段时间的受警记录等详细记录,并可选定某车某时间段的位置记录进行轨迹回放。
方案:
历史资料有2个保存途径:一是车载终端,使用SD卡记录信息(黑匣子),当GPRS网络没有覆盖或车辆出现被盗等情况时,仍有数据记录。二是在监控中心数据库的信息。
3.8、数据库管理及查询打印功能
建立各类数据系统,包括:用户数据管理系统、车载终端管理系统、协助单位管理系统、值班员管理系统、警情管理系统、录音管理系统等,并进行存储,可提供查询、回放、打印等功能。
方案:
通过网络服务器,监控中心数据库能提供查询、在线打印功能。
4、设计应用标准
《安全防范工程的程序与要求(GA/T75)》
《防盗报警中心控制台(GB/T16572)》
《入侵探测企通用技术GB10408.1》
《数字通信接口标准G.703》
《国际图像音视频编码标准(ISO11172)》
《安全防范系统验收规则GA308-2001》
《油罐车标准GB 20951-2007》
《欧洲防爆标准ATEX100a》
防爆安全方案:按照防爆认证的相关要求,终端的每个部分,包括传感单元,在安装完毕后都要用环氧树脂进行浇灌处理(使用E-44和低分子聚酰胺650)。按照防爆认证中的相关要求,外接线的供电线长期暴露在空气中,为避免短路造成影响,电源模块会对供电电压进行检测,一旦出现短路则切断外接线供电并发出报警声。
5、基于Spartan-6的高速数据转换收发控制FPGA模块
5.1、应用VHDL语言编写,其优点是:
①支持广泛、易于修改:由于VHDL已经成为IEEE标准所规范的硬件描述语言,目前大多数EDA工具几乎都支持VHDL,这为VHDL的进一步推广和广泛应用奠定了基础。在硬件电路设计过程中,主要的设计文件是用VHDL编写的源代码,因为VHDL易读和结构化,所以易于修改设计。
②强大的系统硬件描述能力:VHDL具有多层次的设计描述功能,既可以描述系统级电路,又可以描述门级电路。而描述既可以采用行为描述、寄存器传输描述或结构描述,也可以采用三者混合的混合级描述。另外,VHDL支持惯性延迟和传输延迟,还可以准确地建立硬件电路模型。VHDL支持预定义的和自定义的数据类型,给硬件描述带来较大的自由度,使设计人员能够方便地创建高层次的系统模型。
5.2、使用IEEE.STD_LOGIC_1164标准,代码简洁易懂,下面给出一个文件头。
LIBRARY IEEE;
USE IEEE.STD_LOGIC_1164.All;
USE IEEE.STD_LOGIC_UNSIGNED.ALL;
ENTITY segment0 IS
PORT (CLK : IN STD_LOGIC;
EN : IN STD_LOGIC;--Activity LOW
DIN : IN STD_LOGIC_VECTOR(15 DOWNTO 0);--BCD8421 code
NOTHING : IN STD_LOGIC;--Activity LOW
DOUT : OUT STD_LOGIC_VECTOR(6 DOWNTO 0);--A,B,C,D,E,F,G
DIG : OUT STD_LOGIC_VECTOR(3 DOWNTO 0));--one hot code
END segment0;
6、ARM9微处理器嵌入式图像处理和显示模块方案

2440核心板模块框图
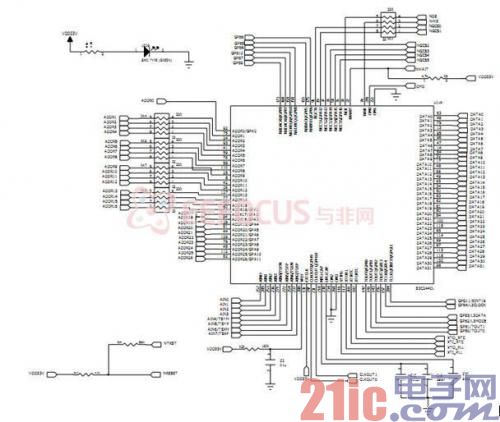
S3c2440A原理图
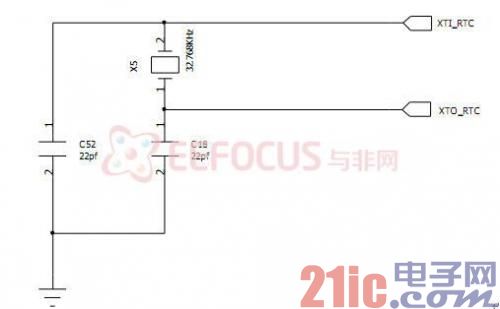
RTC CLOCK原理图
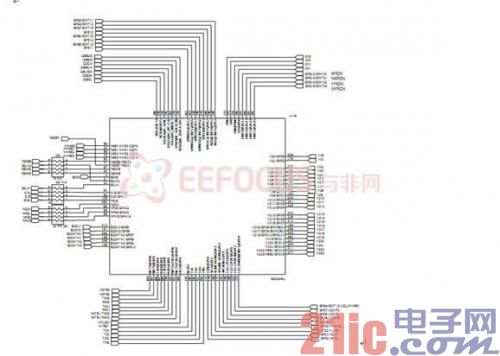
S3c2440B原理图
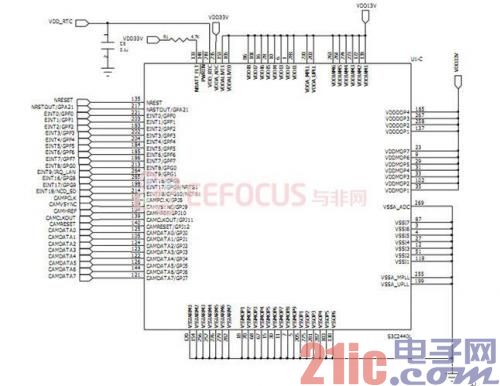
S3c2440C原理图
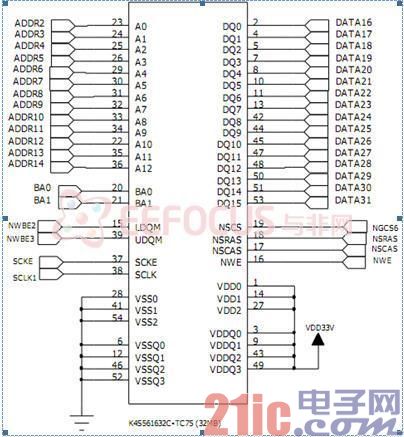
SDRAM
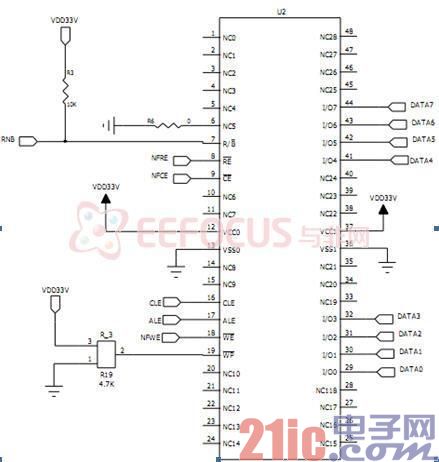
FLASH128
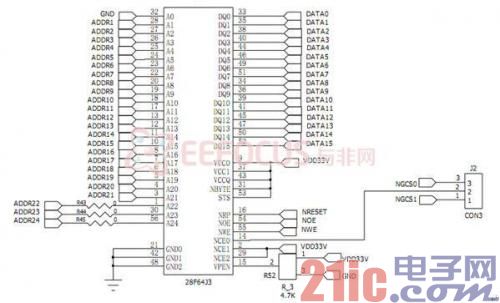
NOR FLASH






评论