基于PCC控制器的磨毛整理机电控系统设计

PID调节器由比例调节器(P),积分调节器(I)和微分调节器(D)构成,图4.3所示为PID控制系统框图。
本文引用地址:https://www.eepw.com.cn/article/201608/295116.htm
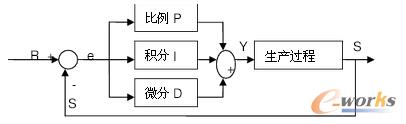
图4.3 PID控制系统框图
图中R为设定的期望值,Y为控制变量,S为实际输出值,e为控制偏差值(e=R-S)。
工作原理:直接采用PCC里面具备的PID指令编程模块,从模拟量输入通道获取指定的张力信号--->AD--->张力数字量--->进入PID模块,按照设定参数(比例系数、微分时间、积分时间等)通过PID计算---->调整后的张力值,将运算结果放到输出通道。通过公式转换计算出调整后的频率值。
4.3.2 PID控制算法
PID控制是根据给定值R(t)与实际输出值S(t)之间的偏差e(t)来进行控制的。将偏差的比例 (P),积分(I),和微分(D)通过线性组合构成控制量,对受控对象进行控制 。
PID控制算法的基本运算式如下:
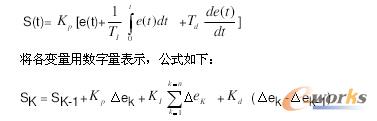
在张力控制中,综合考虑PCC的运算速度和伺服控制系统转速以及控制精度的要求,采样周期设为200ms。
式中SK为第K次伺服电机输出脉冲频率,控制伺服电机的速度。SK-1 为上一次脉冲输出频率值。
△ek为实际输出的脉冲数和应该要输出的脉冲数之差。
△ek= ek- ek-1为第K次采样所获得的偏差数。
△ek-1= ek-1- ek-2为第K-1次采样所获得的偏差数。
Kp,Ki,Kd分别为比例系数、积分系数、微分系数。
实际调试过程可对Kp,Ki,Kd进行调试,选定合理的值,保证偏差控制在合理的范围之内。
4.3.3 张力控制程序流程图
张力控制程序流程图如图4.4所示。
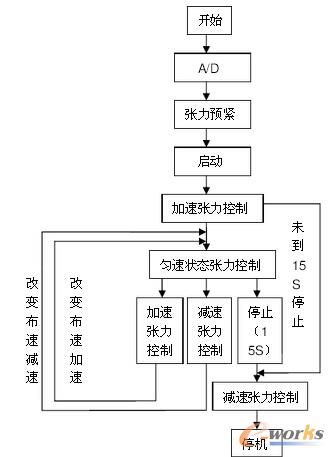
图4.4 张力控制程序流程图
首先张力传感器的值被传送到PCC的模拟输入通道,通过模拟量转换为数字量,之后可以先进行张力预紧,使运行前各张力达到设定值的70%左右,以免全机启动后张力立即松掉。
全机启动后,伺服和变频控制系统由0开始加速运转,进行加速过程中张力的实时控制。在加速15s后系统进入匀速运转阶段,此时,加速张力控制关闭,开启匀速状态张力控制来实现匀速状态下张力的实时控制。在匀速状态改变设定值,就进入加速或减速状态,时间为5s。张力控制采用传统的PID控制。全机停止时,开启减速张力控制,直到机器停止。
5 结束语
本设计主要从控制系统工作原理、硬件结构及软件模块设计等方面探讨了磨毛整理机电控系统。采用PCC作为核心控制单元,将导布系统用伺服控制系统代替变频控制系统后,使磨毛机运行过程中各张力值更加稳定。实现了技术突破,大大提高了生产效率和系统稳定性。织物经磨毛机加工后,手感柔软滑爽,绒毛短匀,有的织物可达到观之无毛摸之柔爽的效果,极大的提高了织物的附加值。








评论