基于数据拟合的激光焊接焊缝图像表面缺陷检测

3 焊缝图像表面缺陷检测
3.1 焊缝图像端点位置识别
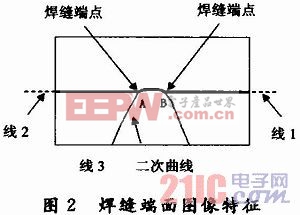
焊缝端点位置是焊缝轮廓上极为重要的特征点,是计算焊缝表面缺陷的基础。挺取出激光条纹的中心线,需要在中心线上识别出焊缝的端点位置。图2为激光焊接焊缝端面轮廓特征。由图2可知,线1和线2表现为直线特性,线3表现为曲线特性,且与二次曲线近似。采用最小二乘法分别拟合出直线1见式(1),直线2见式(2)和曲线3见式(3)。
联立方程(1)和(3)并去除无用点坐标可得焊缝端点B位置坐标,同理联立方程(2)和(3)可得焊缝端点位置A坐标。本文引用地址:https://www.eepw.com.cn/article/194771.htm
3.2 表面缺陷计算方法
计算焊缝凹凸度实质上就是计算焊缝截面轮廓上介于A,B之间的点到图2中A和B间线段的距离的最大值,正值为凸度,负值为凹度。具体计算如下:
(1)首先由3.1节确定了端点A,B的位置坐标分别为A(xa,ya),B(xb,yb)以及拟合的介于端点A,B之间的二次曲线为y=a3x2+b3x+c3。 a3,b3,c3为二次曲线系数;A和B之间的线段为理想的焊缝端面轮廓,所在直线记为ax+by+c=0。
(2)在焊缝中心线图像上搜索介于端点A,B之间所有焊缝中心线的像素点,记录搜索到像素点的位置坐标(xi,yi)、判断点(xi,yi)和直线ax+by+c=0的位置关系,如果点(xi,yi)位于该直线上方,利用式(4)求点到该直线的距离并记为正,计入数组d+(i);如果点(xi,yi)位于该直线下方,利用式(4)求点到该直线的距离并记为负,计入数组d_(i)。
![]()
(3)在数组d+(i),d_(i)中搜索极大值如式(5)和式(6),即为以像素为单位的凹度和凸度,在应用中应转化为工件坐标系下具有实际单位的数值。
![]()



评论