单交叉路口半感应控制器设计

3.3 仿真与时序分析
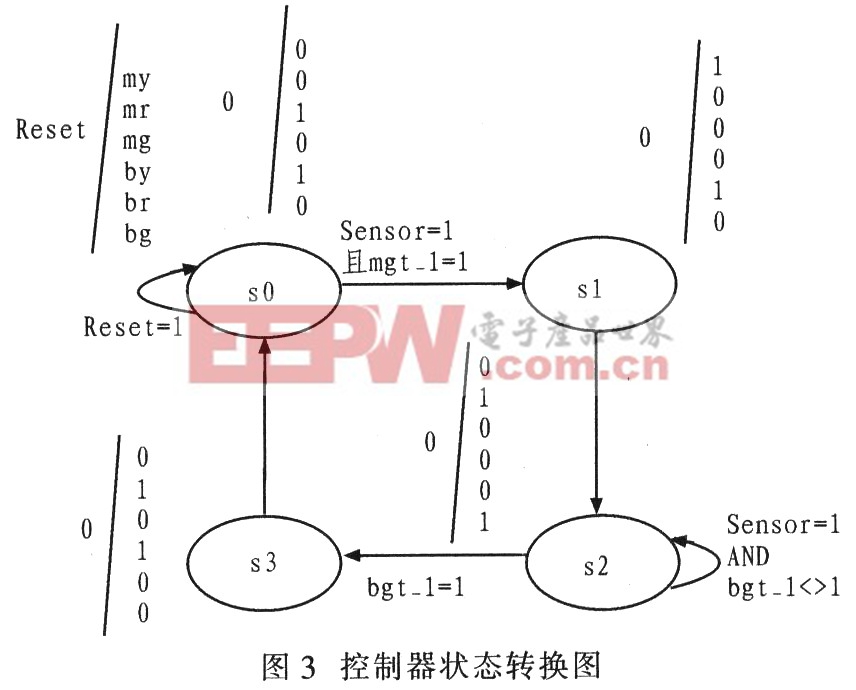
采用CPLD设计单交叉路口半感应控制器,设计完成后使用MAXPLUSⅡ对各个模块进行系统仿真。系统参数设置:非感应相最小绿灯时间为40 s,黄灯为2 s,感应相单位绿灯延续为4 s,感应相最大绿灯时间为28 s。my,mr,mg分别为非感应相黄、红、绿灯控制信号;by,br,bg分别为感应相黄、红、绿灯控制信号。图4为感应相有车时仿真图,图5为感应相仿真图。
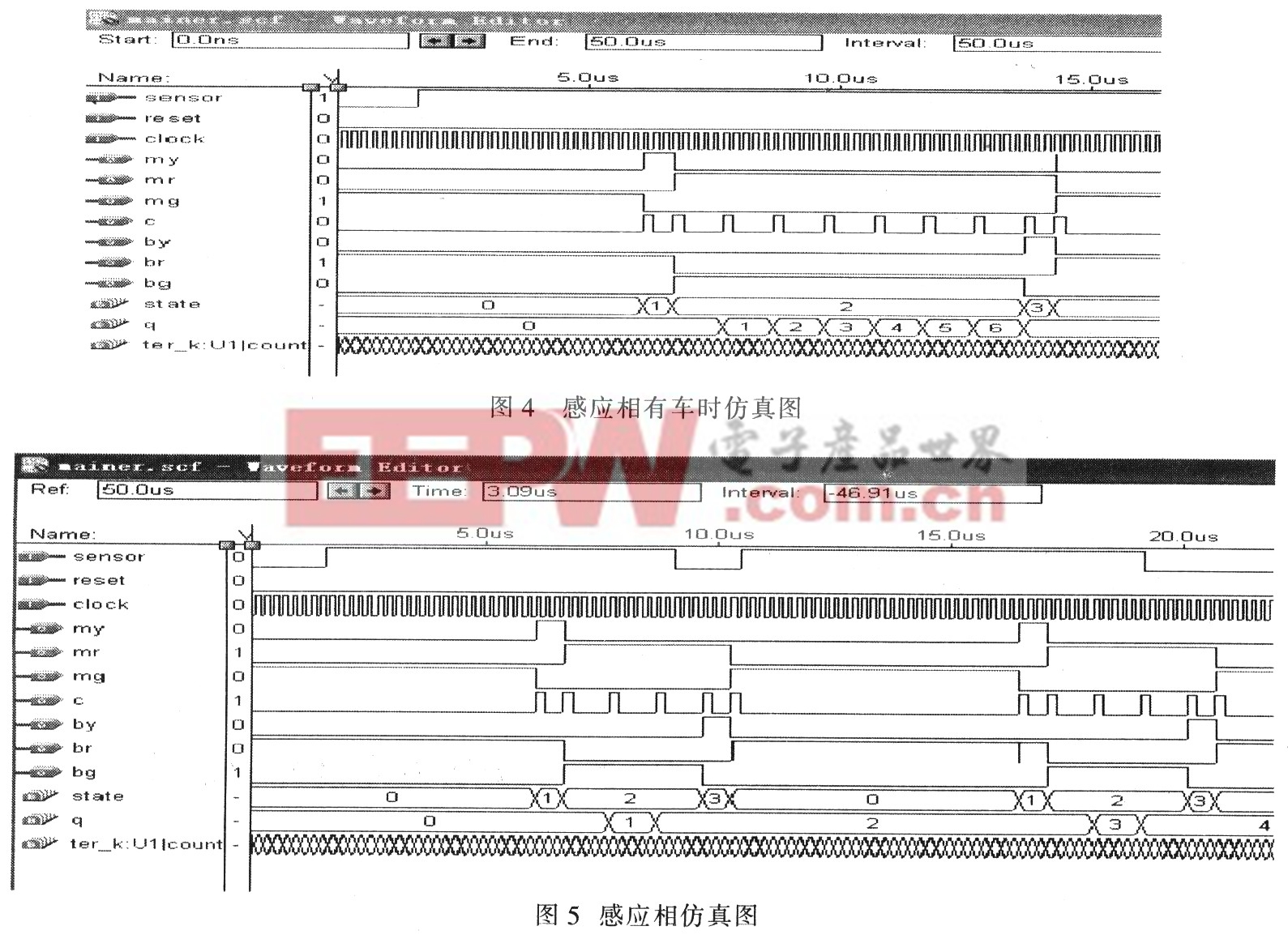
图4表明,系统可以实现感应相和非感应相的正常顺序切换。当感应相有车辆时,绿灯信号并不能立即从非感应相切换到感应相,必须等到非感应相最小绿灯时间到达后,实现通行权的转换,保证主干道的车辆通行。
图5表明,当通行权转移到感应相时,如果在经过单位绿灯延续后,没有车辆到达感应相,则通行权又转移到非感应相,这样既保证了感应相车辆的通行需求,又避免了因感应相车流量小而造成的交通资源浪费。
4 结束语
仿真结果表明,以CPLD为核心控制器,使用VHDL语言编程,可以实现单交叉路口半感应控制器的设计。使用CPLD可编程器件,灵活性好、开发周期短、抗干扰能力强。分析半感应控制方法的基本原理,并简要说明系统参数选取时应考虑的问题,并介绍用CPLD实现设计的基本方法。

评论