基于运算放大器的PIN驱动器电路

PIN二极管偏置接口本文引用地址:https://www.eepw.com.cn/article/187734.htm
将开关驱动器控制电路与PIN二极管相连,以便通过施加正向或反向偏置来开关二极管,是一项具有挑战性的工作。偏置电路通常使用一个低通滤波器,它位于RF电路与开关驱动器之间。图5显示了一个单刀双掷(SPDT) RF开关及其偏置电路。当设置妥当时,滤波器L1/C2和L3/C4允许将控制信号施加于PIN二极管D1–D4,控制信号与RF信号(从RF IN切换至PORT 1或PORT 2)的相互影响极少。这些元件允许频率相对较低的控制信号通过PIN二极管,但会阻止高频信号逃离RF信号路径。不正常的RF能量损耗意味着开关的插入损耗过高。电容C1、C3和C5阻止施加于二极管的直流偏置侵入RF信号路径中的电路。直流接地回路中的电感L2允许直流和低频开关驱动器信号轻松通过,但对于RF和微波频率则会呈现高阻抗,从而降低RF信号损耗。
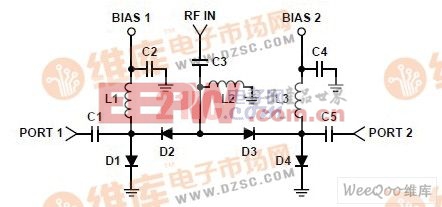
图5. 典型单刀双掷(SPDT) RF开关电路
偏置电路、RF电路和开关驱动器电路全都会发生交互,影响彼此的性能,因此像所有设计一样,权衡考虑各种因素十分重要。例如,较大的C2和C4 (>20 pF)对RF性能有利,但对驱动器则是麻烦,因为大电容会导致上升沿和下降沿较慢。快速开关对大多数应用都有利;因此,为了实现最佳驱动器性能,电容必须极小,但为了满足RF电路要求,电容又必须足够大。
传统PIN二极管驱动器
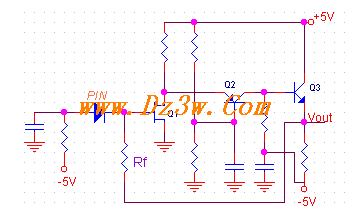
PIN二极管驱动器有各种形状和尺寸。图6给出了一个可提供高开关速度的典型分立开关驱动器的原理图。这种驱动器既可以采用“片线”(混合)结构来实现,也可以采用“表贴”(SMT)器件来实现;前者非常昂贵,后者虽不昂贵,但需要的印刷电路板(PCB)面积多于混合结构。
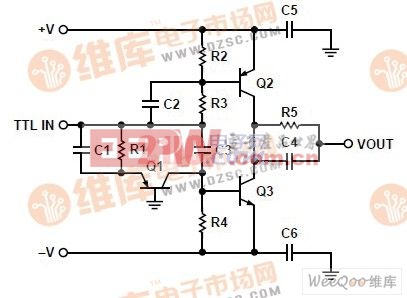
图6. 分立开关驱动器电路
还有专用开关驱动器集成电路(IC);这些IC十分紧凑,提供TTL接口,并具有良好的性能,但灵活性有限,而且往往很昂贵。还有一种开关驱动器架构应当考虑,即采用运算放大器。运算放大器开关驱动器的明显优势在于其自身的灵活性,可以轻松地对其进行配置,以适应不同的应用、电源电压和条件,为设计人员提供丰富的设计选项。
运算放大器PIN二极管驱动器
运算放大器电路是一种很有吸引力的PIN二极管驱动备选方案。除灵活性外,这种电路常常还能以接近或超过1000 V/μs的跃迁速度工作。下面将介绍三种不同的RF PIN二极管放大器驱动电路。所选放大器虽然在根本特征上各不相同,但都能执行类似的功能。这些放大器电路可以驱动硅或砷化镓(GaAs) PIN二极管,但各有各的特点。
AD8037 — 箝位放大器
该电路能以最高10 MHz的频率工作,具有出色的开关性能,总传播延迟为15 ns。通过改变增益或箝位电压,可以调整输出电压和电流,以适应不同的应用。
箝位放大器AD8037原本设计用于驱动ADC,可提供箝位输出以保护ADC输入不发生过驱。图7所示配置用一对AD8037(U2和U3)驱动PIN二极管。
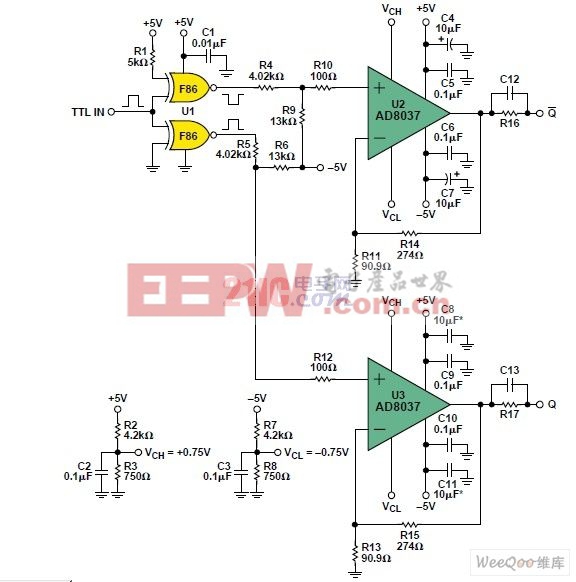
图7. AD8037 PIN二极管驱动器电路
本例中,U2和U3采用同相配置,增益为4。利用AD8037的独特输入箝位特性,可以实现极其干净和精确的箝位。它可以线性放大输入信号,最高可达增益乘以正负箝位电压(VCH和VCL)。当增益为4且箝位电压为±0.75 V时,如果输入电压小于±0.75 V,则输出电压等于输入电压的4倍;如果输入电压大于±0.75 V,则输出电压箝位在最大值±3 V。这一箝位特性使得过驱恢复非常快(典型值小于2 ns)。箝位电压(VCH和VCL)由分压器R2、R3、R7和R8确定。数字接口由74F86 XOR逻辑门(U1)实现,它提供U2和U3所用的驱动信号,两路互补输出之间的传播延迟偏斜极小。电阻网络R4、R5、R6和R9将TTL输出电平转换为大约±1.2 V,然后通过R10和R12馈送给U2和U3。
U2和U3的±1.2-V输入提供60%过驱,以确保输出会进入箝位状态(4 × 0.75 V)。因此,硅PIN二极管驱动器的输出电平设为±3V。电阻R16和R17限制稳态电流。电容C12和C13设置PIN二极管的尖峰电流。
AD8137 — 差分放大器
差分放大器(本例所用的AD8137)可以低成本提供出色的高速开关性能,并使设计人员能够十分灵活地驱动各种类型的RF负载。有各种各样的差分放大器可供使用,包括速度更快、性能更高的一些器件。高速差分放大器AD81374通常用于驱动ADC,但也可以用作低成本、低功耗PIN二极管驱动器。其典型开关时间为7 ns至11 ns,其中包括驱动器和RF负载的传播延迟。它提供互补输出,功能多样,可以替代昂贵的传统驱动器。
图8所示电路将单端TTL输入(0 V至3.5 V)转换为互补±3.5V信号,同时可使传播延迟最小。TTL信号放大4倍,在AD8137输出端产生所需的±3.5V摆幅。TTL信号的中点(或共模电压)为1.75 V;必须将同样的电压施加于R2,作为参考电压VREF,以免在放大器输出端引入共模失调误差。最好从一个低源阻抗驱动此点;任何串联阻抗都会增加到R1上,从而影响放大器增益。

图8. PIN二极管驱动器原理图
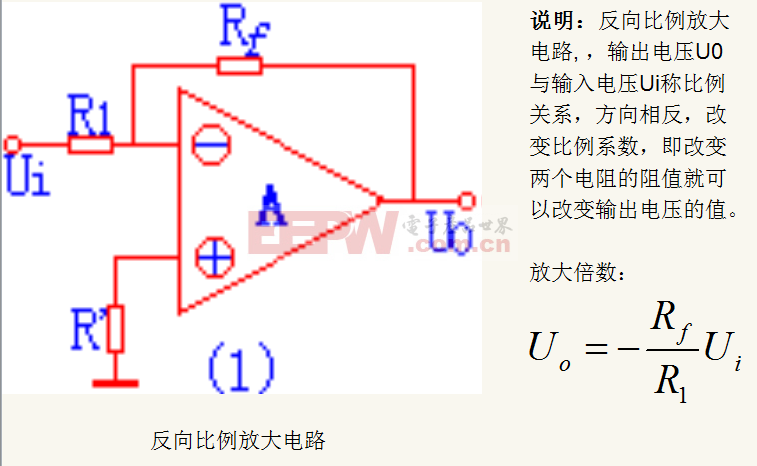
输出电压增益可由公式4计算:






评论