数控机床工作台位置伺服系统的分析和设计

系统的开环传递函数为

根据系统开环传递函数,用MATLAB编程绘制系统Bode图,结果如图3所示。通过K a=1的Bode图,发现系统的相角裕量和幅值裕量都是负值所以系统不稳定[2][3]。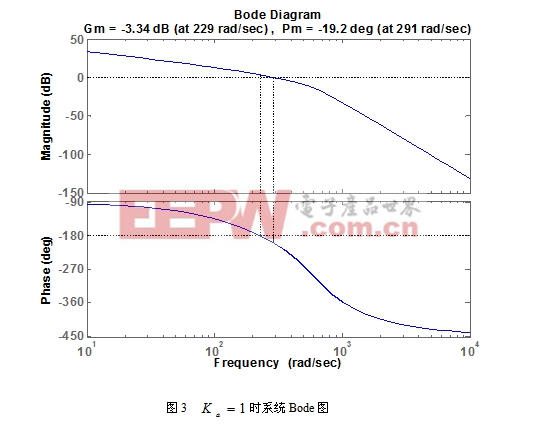
MATLAB程序如下:
Ka=1
num=Ka*4216e-6*1.25e6*9.56e-4*100
den=conv([1/600^2 2*0.5/600 1],[1/388^2 2*1.24/388 1 0])
sys=tf(num,den)
margin(sys)
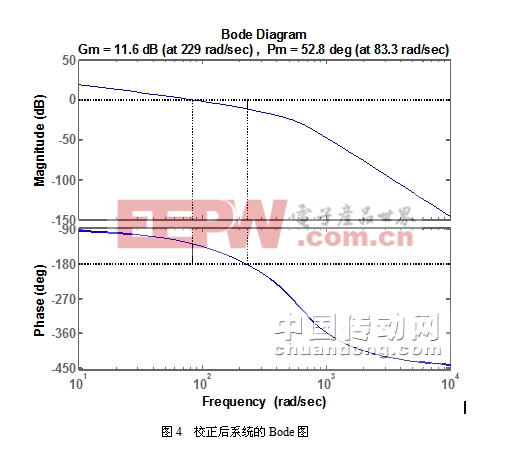
4 系统校正和动态性能指标计算
一般为满足电液伺服系统设计要求的相角裕量应该在30~60之,幅频裕量应当大于6dB。因此,将图中零dB线上移,使相位裕量=50,此时增益裕量G=11dB,穿越频率 ,开环增益
,开环增益
由上述操作得开环增益

所以放大器开环增益

,运行模型,得出系统输出结果可以看出系统是稳定的,当输入
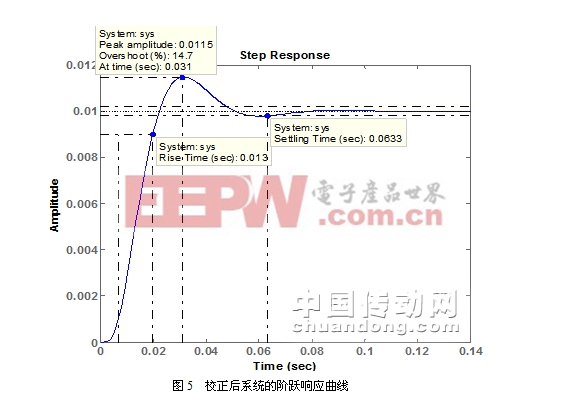
运用MATLAB对系统动态性能指标分析得
5 系统稳态误差和频带宽度计算
对于干扰来说,系统是零型的。启动和切削不处于同一动作阶段,静摩擦干扰就不必考虑。伺服放大器的
温度零漂 、伺服阀零漂和滞环
、伺服阀零漂和滞环 、执行元件的不灵敏区
、执行元件的不灵敏区 假定上述干扰量之和为
假定上述干扰量之和为 ,由此引起的位置误差为:
,由此引起的位置误差为:

对指令输入来说,系统是Ⅰ型的,最大速度 时的速度误差为
时的速度误差为
调用MATLAB中求系统频带宽度程序得系统频带宽度为:
6 结论
电子负载相关文章:电子负载原理 锁相环相关文章:锁相环原理




评论