复智能光电旋钮的设计

智能光电旋钮的软件主要是设计 8031单片机系统的定时器中断,判别遮光片的旋转方向和旋转速率。设计难点在于旋转方向识别。
旋转方向识别原理
将两对光电收发器的接收部分近似为A、B两个点,当遮光片旋转时,如图4所示。
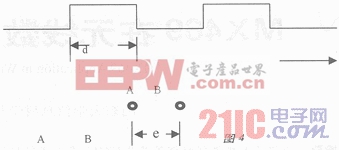
图中,设A、B两点间距为“e”,遮光片的遮光区长度为“d”。旋钮制作时使遮光片的遮光区长度和非遮光区长度相等,且“d”大于“e”。遮光片旋转时,其运动图像可近似为周期性占空比为1:1的矩形脉冲(凸部代表遮光区,凹部代表透光区)。这样,当遮光片向箭头方向移动时,必然循环处于:A、B被完全遮蔽;A 未遮蔽而B被遮蔽两种状态。当遮光片反向移动时,则循环处于:A、B被完全遮蔽;B未遮蔽而A被遮蔽两种状态。
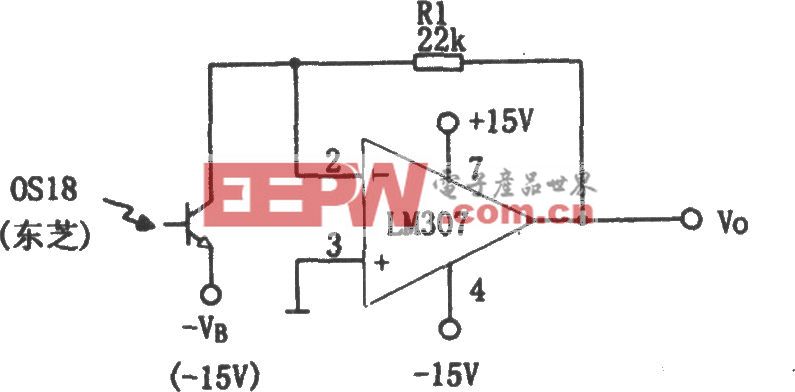
光电收发器收端处于遮蔽状态时,单稳态触发器输出高电平,反之,则输出低电平。所以,单片机只需定时采集输入的电平,将“检测到A、B被完全遮蔽”作为判决起始点,然后根据是否紧接着出现“A 未遮蔽而B被遮蔽”或“B 未遮蔽而A被遮蔽”这两种状态来判断其旋转方向。
旋转速率识别原理
旋转速率的识别实质上是识别“A、B完全遮蔽”和“A、B之一未遮蔽”这两种状态转换的频率。同样,如果将“A、B被完全遮蔽”作为判决起始点,然后根据是否紧接着出现“A 未遮蔽而B被遮蔽”或“B 未遮蔽而A被遮蔽”这两种状态之一,无论哪种状态一出现,都在脉冲输出端产生一脉冲信号。同时,对产生的脉冲信号记数,脉冲的总个数除以脉冲记数的时间,就能得到旋转速率。






评论