基于语音辨识的遥控小车的设计

2.1.5 获取识别结果调用int BSR_GetResult(void),用于完成语音识别,并返回语音识别结果。返回值为0,无命令识别;返回值-1,识别器停止、未初始化;返回值-2,识别不合格;识别成功返回命令的序号。
2.1.6 停止识别调用void BSR_StopRecognizer(void),用于停止识别。调用此函数时,FIQ_TMA中断关闭。本文引用地址:https://www.eepw.com.cn/article/163598.htm
小车语音训练流程图如图4所示。语音识别部分在main函数中,A口的设置即小车的逻辑控制部分放在InitIO.asm文件中。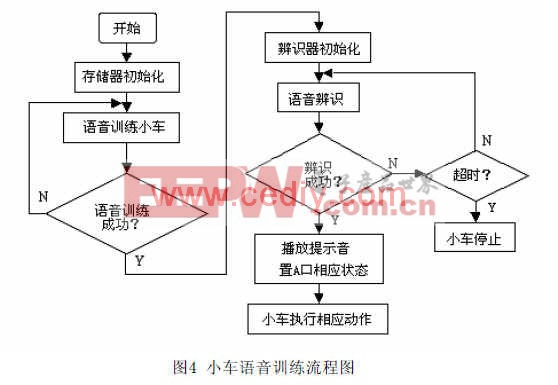
2.2 定时中断 小车的运动控制采用语音控制和中断定时控制相结合,通过语音触发小车动作,小车行驶中可通过语音指令改变小车的运动状态。在每一次动作触发的同时启动定时器,如果小车由于某些原因不能正常的接收语音指令,则定时时间一到,中断服务程序就会发出指令让小车停下来。
3.结束语
设计完成的小车经测试,遥控有效距离可达 5米,对特定使用者语音识别可达95%以上,在有效范围内小车能够实时响应使用者的语音命令,实现前进、后退、左转及右转,且在每一次状态改变时会有语音应答,增强了互动性。在 10秒内若没有语音命令发布,小车会自动停止。
本设计的创新点在于采用了具有语音处理功能的凌阳 SPCE061A单片机与专用的红外遥控芯片TX-2B结合形成遥控电路,将声控与红外遥控相结合,增强了小车抗噪音能力,也增加了小车的可控距离,并且系统的实现方便简单。






评论