基于PROFIBUS-DP现场总线的恒温控制系统

(1)在t1和t4阶段:若ek<-a,则停止加热;若ek≥-a,即误差在允许范围内,此时,又分两种情况讨论:
a)当在t1阶段时,则开始加热。在这里提前加热,是为了防止输出量继续下降,反方向偏离给定,从而使输出维持在误差允许范围内;
b)当在t4阶段时,则维持原状态。
(2)在t2和t3阶段:若ek≥b,则开始加热;若ek<b,即误差在允许范围内,此时,又分两种情况讨论:
a)当在t3阶段时,则停止加热。在这里提前停止加热,是为了防止输出量继续上升,反方向偏离给定,从而使输出维持在误差允许范围内;
b)当在t2阶段时,则维持原状态。
4 新型PID控制算法在S7-300 PLC中的软件实现
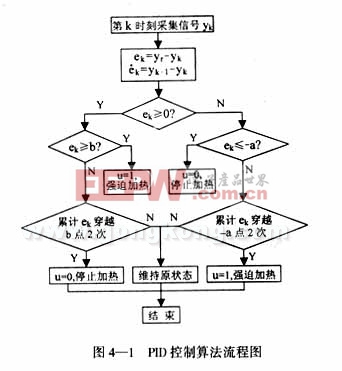
在S7-300 PLC中,使用了梯形图编程方法。在库中有3个与PID调节器相关的功能块FB41、FB42和FB43。FB41用于模拟PID调节器,FB42用于数字PID调节器,FB43是脉冲发生器,用于输出量为脉冲的PID调节器。在这里,因为输入量是温度信号,是模拟量,而输出又是开关量,所以调用了功能块FB41和FB43。新型PID算法的流程图如图4―1所示。
5 结束语
(1)该文使用的新型PID控制算法简单有效,易于软件实现,在工程应用中取得了显著效果。
(2)使用了PROFIBUS-DP现场总线技术,使得布线简单,数据传输速率高。
(3)使用了S7-300 PLC,使得系统工作稳定,抗干扰能力强,而且维修方便。

pid控制器相关文章:pid控制器原理








评论