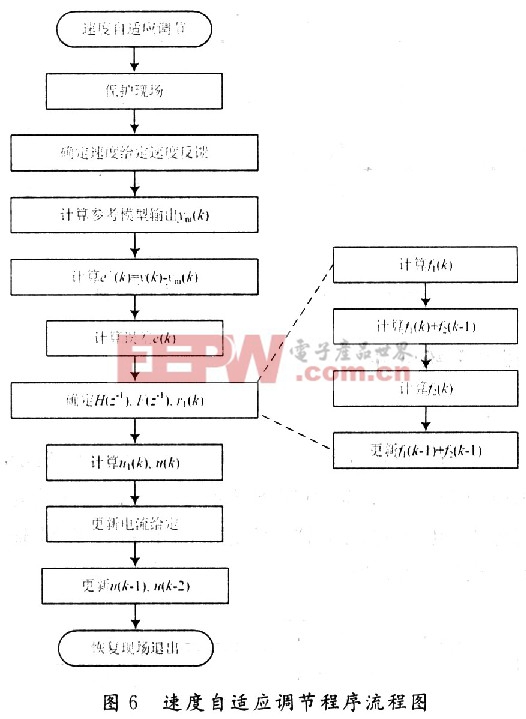
燃料电池车离散MRAC电机控制系统的DSP软件设计 作者: 时间:2010-07-22 来源:网络 加入技术交流群 扫码加入和技术大咖面对面交流海量资料库查询 收藏 <a href='https://ad.eepw.com.cn/www/delivery/ck.php?n=a635e61e&cb=INSERT_RANDOM_NUMBER_HERE' target='_blank'><img src='https://ad.eepw.com.cn/www/delivery/avw.php?zoneid=88&cb=INSERT_RANDOM_NUMBER_HERE&n=a635e61e' border='0' alt='' /></a> <a href='https://ad.eepw.com.cn/www/delivery/ck.php?n=a576c0a2&cb=INSERT_RANDOM_NUMBER_HERE' target='_blank'><img src='https://ad.eepw.com.cn/www/delivery/avw.php?zoneid=87&cb=INSERT_RANDOM_NUMBER_HERE&n=a576c0a2' border='0' alt='' /></a> 这样可以得到参考模型输出。被控对象速度输出y(k)由速度检测电路检测,可得预报误差:可得u(k)。根据以上分析编写速度自适应控制程序,流程图如图6所示。3 结语 自适应控制理论在燃料电池车电机控制系统中的应用,对于提高电动汽车的驱动性能具有较好的效果。本文探讨了在电机DSP控制系统中,离散模型参考自适应算法的实现,对于各种先进的控制策略在电动汽车中的应用进行了积极的探索,对于推动电动汽车产业的发展具有重要意义。 上一页 1 2 3 下一页













评论