基于ADNS2610的微型飞机速度检测系统设计

3 透镜系统设计
透镜焦距的选择对于整个系统的设计至关重要,因为它决定了微型飞机在使用本测速系统时的高度范围。微型飞机使用光流法测速的场合主要是在近地飞行过程中,因此选用的透镜系统的物距应该适合近地飞行时使用。为了节约成本,选用了电脑上常用的一种摄像头上的透镜系统,其焦距为4mm,其物距范围为几厘米到几米,完全能满足要求。该系统透镜与ADNS2610的感光面的距离是可以连续调节的,这样就可以方便地调节成像的清晰度。
在实际使用过程中,透镜与感光面的距离一旦确定就不再改变。这样虽然随着飞机高度的变化,成像清晰度可能会有所改变,但是只要在限定的高度范围内,成像的清晰度是能够保证的,因此不影响测速,并且还能够简化计算过程。
因为图像的最大移动速度为12inch/s以及透镜焦距为4mm,可以推导出测速时微型飞机的最大相对于地面飞行角速度为76.2 rad/s。
4 软件设计
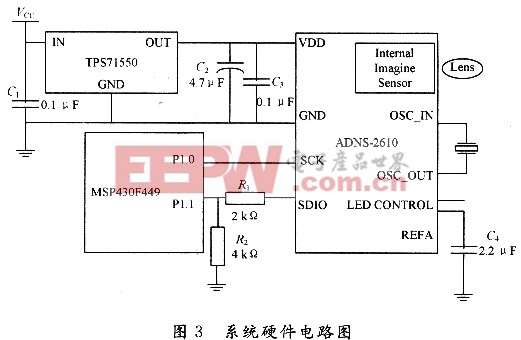
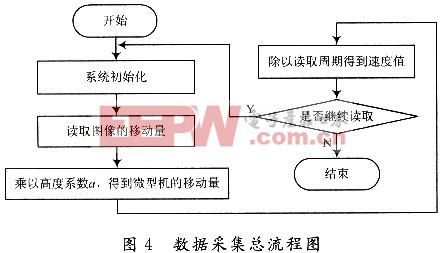
测速软件包括主控芯片的初始化、位移量的读取、速度的计算这几个模块。系统的初始化主要针对控制芯片MSP430F449的相应控制引脚而言,包括设置I/O端口、输出频率、存储区间等。根据ADNS2610的数据手册,在读数据的过程中,在发送完最后一个地址位后,微控制器的SDIO端口必须进入高阻态。这里把MSP430的相应引脚设置为输入状态,可以满足对微控制器的高阻态要求。程序软件设计的总流程图如图4
所示。
读数据的过程由微控制器来驱动,时序如图5所示。
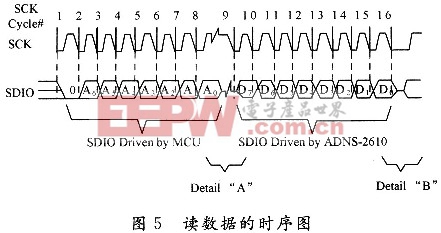
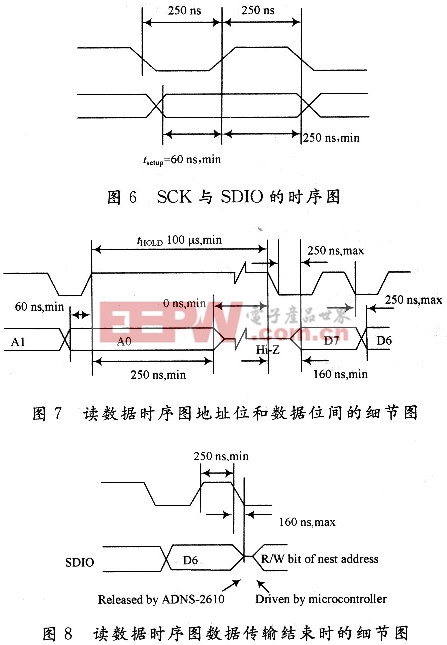
每条读数据命令包含2个字节,第1个字节代表地址,最高位为O。在数据传输过程中,SDl0的数据在时钟下降沿被设置,在时钟上升沿被接收。在向ADNS2610传输数据的过程中,时钟脉冲和数据的变化之间有一定的时序关系,如图6所示。在地址位传输结束后,微控制器的SDIO端口必须被设置为高阻态,并且串口的时钟必须要有不小于100μs的延迟,如图7所示(图5中的detail“A”)。最后一个数据位传输结束以后,ADNS2610会进入高阻态,这时SCK和SDIO之间的时序关系如图8所示(图5中的detail“B”)。根据时序要求可以看出,如果以读取X和Y方向上移动量各1次为1个周期T,那么周期T大于200μs。
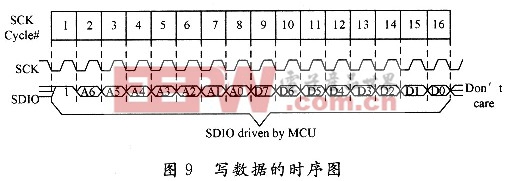
向ADNS2610写数据的时序图如图9所示,也是先传送地址位再传送数据位。其中地址位的最高位为1。SCK和SDIO的信号脉冲时序要求如图6所示。需要注意的是,写数据结束以后,必须延时100μs以上才能够进行下一次读或者写操作。
以X轴为例给出速度的计算过程。传感器的分辨率为400 cpi,所以Delta_X的单位为O.0025inch。如果周期T的单位为s,则:

Y轴的速度计算过程和X轴相同。
图像的解析度是400 counts/inch,图像的最大移动速度是12inch/s,因此最大的计数速度是4800counts/s。Delta_X和Delta_y的绝对值最大为127,因此最大的读数周期为0.0265s。







评论