基于Labview的雷达动目标仿真

3)二相码
一般相位编码(PCM)信号的复数表达式
式中,u(t)=a(t)exp[jψ(t)]为其复包络,ψ(t)是相位调制函数,a(t)是幅度调制函数或称为PCM的包络。对二相码而言,ψ(t)∈{ψk=0,π}或表示为二进制序列{Cn=O,1,…,N-1}∈Ck={exp[jψ(k)]=+1,-l}。如果假设a(t)为矩形函数(亦可采用调幅),即
式中,v(t)为所谓子脉冲函数,τc为子脉冲宽度,N为子脉冲数或码长,τ=Nτc是编码信号的持续期。
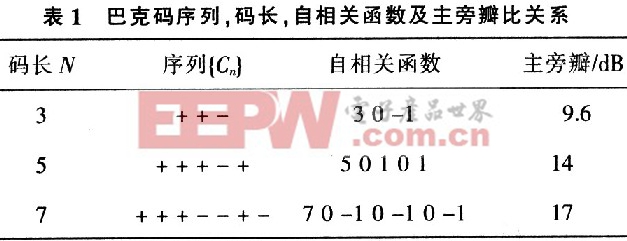
对于二相的巴克码序列,其码长N、自相关函数及主旁瓣比的关系如表1所示。本文引用地址:https://www.eepw.com.cn/article/162905.htm
3 动目标显示(MTI)
MTI(运动目标显示)的本质含义:基于回波多谱勒信息的提取而区分为运动目标和固定目标。当固定目标、地杂波与运动目标处于同一距离单元时,前者的回波通常比较强,以至于运动目标的回波被“淹没”其中,故必须设法区分二者。因固定目标回波中的多谱勒频率为零,慢速运动的杂波中所含的多谱勒频移也集中在零频附近,它们的回波经相位检波后,输出信号的相位将不随时间变化或随时间作缓慢变化,反映在幅度上则为其幅度不随时间变化或随时间作缓慢变化。相反,运动目标回波经相位检波后,因其相位随时间变化较大,反映在幅度上则为其幅度随时间变化较快。因此,若将同一距离单元在相邻重复周期内的相检输出作相减运算,则固定目标回波将被完全对消,慢速杂波也将得到很大程度衰减,只有运动目标得以保留。显然这样便可将固定目标、慢速杂波与运动目标区别开来。这就是MTI对消的基本原理。
3.1 双脉冲对消
双脉冲对消又称一次对消,其对消公式y(n)=x(n)-kx(n-1)求Z变换则得y(Z)=X(Z)-KZ-1X(Z),由此得到数字系统函数![]() ,将Z=exp(jΩTr)代入数字系统函数得频率响应为
,将Z=exp(jΩTr)代入数字系统函数得频率响应为
![]()
3.2 三脉冲对消
三脉冲对消又称二次对消,其对消公式为:y(n)=x(n)-kx(n-1)+x(n-2),对其求Z变换则得:Y(Z)=(Z)-KZ-1(Z)+Z-2X(Z)。由此可得到数字系统函数为H(Z)=l-KZ-1+Z-2,将Z=exp(jΩTr)代入得频率响应

3.3 盲速处理
当fdTr=n(n=0,1,2,…)时,对消器输出为零,即当![]() 时,运动目标在对消器输出端无信号输出。这里当n=0即fd=O时,对应的固定目标无输出,这是所希望的。与此同时径向速度为零的动目标回波也会被抑制,这是不可避免的。但在n=1,2,3…时,具有这些多谱勒频率(
时,运动目标在对消器输出端无信号输出。这里当n=0即fd=O时,对应的固定目标无输出,这是所希望的。与此同时径向速度为零的动目标回波也会被抑制,这是不可避免的。但在n=1,2,3…时,具有这些多谱勒频率(![]() )的目标,在对消器输出端也没有输出,因此称对应这些多谱勒频率的目标径向运动速度为盲速,记为vro,即
)的目标,在对消器输出端也没有输出,因此称对应这些多谱勒频率的目标径向运动速度为盲速,记为vro,即![]() 。可见盲速是目标在一个重复周期的位移恰好等于λ/2(或其整数倍)的速度。这时相邻周期重复周期的回波初相位差△φs。是2π(或其整数倍),所以从MTI雷达相位检波器输出的视频脉冲幅度相等,故对消后△u=0。
。可见盲速是目标在一个重复周期的位移恰好等于λ/2(或其整数倍)的速度。这时相邻周期重复周期的回波初相位差△φs。是2π(或其整数倍),所以从MTI雷达相位检波器输出的视频脉冲幅度相等,故对消后△u=0。
4 动目标检测(MTD)
MTD与MTI虽同属雷达信号的频域处理范畴,但一般意义上说,MTD是MTI的改进或更有效的频域处理技术。实质上,MTD的核心就是线性DMTI加窄带多普勒滤波器组。实际情况中,多普勒频移不能预知,因此需要采用一组相邻且部分重叠的滤波器组,覆盖整个多普勒频率范围,这就是窄带多普勒滤波器组。
多普勒滤波器的实现方法:具有N个输出的横向滤波器(N个脉冲和N-l根延迟线),经过个脉冲不同的加权并求和后,可以做成N个相邻的窄带滤波器组。该滤波器组的范围为0~fr,fr为雷达工作频率。横向滤波器有N-1根延迟线,每根延迟线的延迟时间为![]() 。设加在N个输出端头的加权值为
。设加在N个输出端头的加权值为
![]()
式中,i表示第i个抽头;k表示0~(N-1)的标记,每个k值对应不同的加权值,相应地对应于一个不同的多普勒滤波器响应。由k表示的N个滤波器组成滤波器组,可写出横向滤波器按上式加权时的脉冲响应为:

脉冲响应的傅里叶变换就是频率响应函数:

滤波器振幅特性是频率响应取幅值。即

滤波器的峰值产生于sin[π(fT-k/N)]=0或者π(fT-k/N)=0,π,2π,…;当k=0时,滤波器峰值位置为f=0,1/T,2/T,…,即该滤波器的中心位置在零频率以及重复频率的整数倍,这个滤波器通过没有多普勒频移的杂波,因此对地杂波没有抑制能力。然而,它的输出在某些MTI雷达中可以作提供杂波地图之用。这个滤波器的第1个零点是当上式分子第1次取零值时,或f=1/(NT)。在第1对零点之间的频带宽度为f=2/(NT),而半功率带宽近似为0.9/(NT)。
5 数据仿真
根据上述提供的等幅线性调频信号模型和巴克码序列,利用Labview软件产生相应的等幅线性调频信号,三相编码,五相编码,七相编码信号。根据MTI和MTD原理,对上述信号进行处理。从图1的仿真结果可以看出,经过MTI处理后,一些固定杂波(目标2,目标3,目标4)经过脉冲对消,匹配滤波,盲速处理,幅度明显减少,淹没在噪声中。运动目标信号明显出现在显示器上。改善因子是衡量MTI雷达工作质量的一个重要指标,定义为输出信号杂波功率比和输入信号杂波功率比之比值。经过上述MTD滤波器处理后,目标凸现。MTD滤波器组中8个滤波器对杂波的改善因子分别是(58.6245,58.8137,58.8260,66.8277,68.0534,59.0719,58.5206,57.8894)。表2给出了在给定发现概率的情况下,使用MTD滤波器前后系统所需的信噪比,可以看出:对信噪比的要求有所降低,因此可以更好检测目标。

评论