基于对目安全二极管激光扫描技术的飞机泊位引导系统

图2对驾驶员指令显示装置飞机在引导过程中,互动显示板将会显示不同的指令,驾驶员根据不同的指令进行下一步的操作,图2为对驾驶员指令2型显示装置。
如图2所示,先确认飞机型号的表示是否正确,“浮动”的箭头表示系统处于动作状态。
跟随引导线,当二条直立的接近速度表示排变为黄色时,则显示激光已捕捉到飞机,并进入识别状态,扫描装置检验飞机型号正确与否,然后显示方位信息指导。
找到闪烁的红色箭头及表示方位指导信息的黄色箭头,闪烁的红色箭头表示方位偏差,黄色块状表示飞机离开中心线的距离。
当飞机接近至最终停止位置12米处时,驾驶员可得到接近率信息,飞机每向前前进0.5米,黄色发光二极管灯排则消灯一行。
当飞机到达适当的停止位置时,画面在显示“停止”的同时,方位显示区域显示2个红色矩形停止指示排,而接近率黄色显示区域则全部熄灭。
飞机停止于正确位置时,2-3秒后,画面显示“OK”;如果飞机超越停止线时,画面显示“TOO FAR”。
飞机至少在距离停止位置12米处时,必须被系统识别,如达不到,系统将显示“STOP”,然后,方位显示区域为2个红色矩形停止指示排,并显示“WAIT”字样,在此期间,系统再次对飞机进行识别,成功时,则继续停靠,反之则显示“停止”。
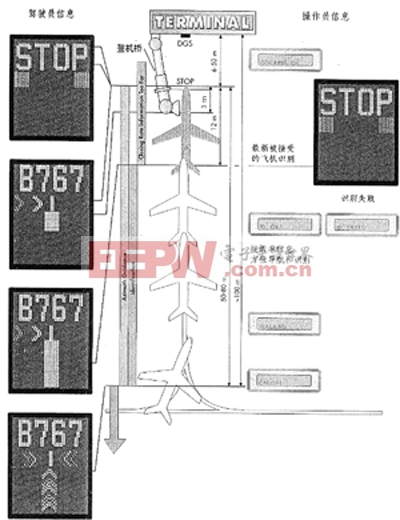
图3飞机泊位引导示意图 从图中可以看出,飞机的泊位过程一直是激光定位飞机位置的过程,体现了该系统及时、准确、明了,与传统图形识别泊位系统相比,有它的显著特点。
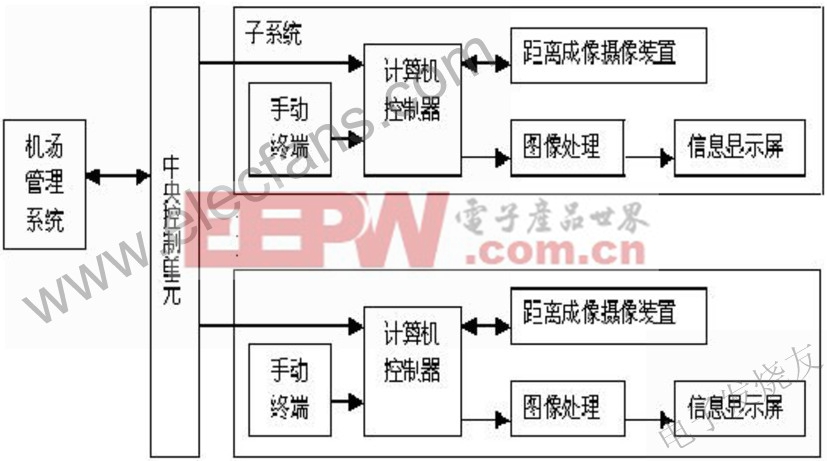
图4为传统图形识别飞机泊位引导系统。

模拟电路相关文章:模拟电路基础
pid控制器相关文章:pid控制器原理






评论