高频斩波式串级调速系统分析

若附加反向电动势Ef 增大,转子电流I减小,电磁转矩TM 减小,若负载转矩T不变,由式(4)可见使转速减小,转速减小又使负载转矩Tc减小2(对于风机、泵类等大容量平方转矩负载c),重新获得转矩的平衡,稳定于新的转速运行,最终达到改变转速的目的。

串级调速关键问题是如何获得附加电动势,如图1中的串级调速控制装置,将转子电压通过三相全波整流桥整流为直流电压Ud ,而三相全桥有源逆变器的工作状态始终固定在最小逆变角βmin ,提供恒定的直流反电势。由于逆变器始终固定工作在最小逆变角βmin ,大大提高了逆变器的功率因数,并且不随转速的调节而变化,从而改善了传统的串级调速系统功率因数低的缺陷。中间直流回路加入高频IGBT 斩波器,通过改变斩波器的占空比(τ/T) ,来获得转子回路的等效附加直流电动势Ub 。
由此可见,斩波式串级调速运行规律为:当占空比越大,即斩波器的导通时间越长,转速越高;反之,则转速越低。并且可以达到足够宽的调速范围和足够精确的转速控制性能,系统功率因数也获得很大改进。
3 仿真模型的建立
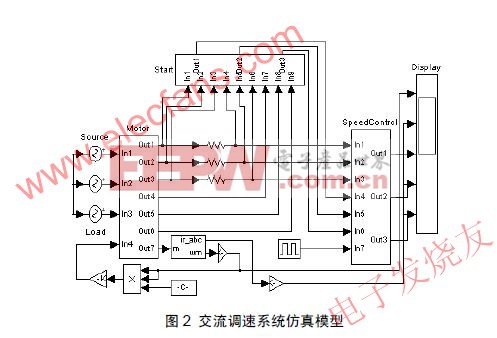
对斩波式串级调速控制系统进行仿真研究,采用MATLAB 软件Simulink 环境下的SimPowerSystem 工具箱建立仿真模型。
3.1 基于封装技术建立仿真模型
建立斩波式串级调速控制系统的仿真模型,包含电气系统和控制回路,模块数量多,模型复杂,不利于工程分析。利用子系统封装技术,将功能相关的模块组合为子系统。
按交流调速系统的三个组成部分建立三个子系统:绕线式异步电动机(Motor)、启动单元(Start)、串级调速控制装置(Speed Control),如图2 所示。整个仿真模型按照电气原理结构图建立,结构清晰,功能明确,便于进行工程设计。







评论