卡尔曼滤波器及多传感状态融合估计算法 作者: 时间:2011-01-04 来源:网络 加入技术交流群 扫码加入和技术大咖面对面交流海量资料库查询 收藏 <a href='https://ad.eepw.com.cn/www/delivery/ck.php?n=a635e61e&cb=INSERT_RANDOM_NUMBER_HERE' target='_blank'><img src='https://ad.eepw.com.cn/www/delivery/avw.php?zoneid=88&cb=INSERT_RANDOM_NUMBER_HERE&n=a635e61e' border='0' alt='' /></a> <a href='https://ad.eepw.com.cn/www/delivery/ck.php?n=a576c0a2&cb=INSERT_RANDOM_NUMBER_HERE' target='_blank'><img src='https://ad.eepw.com.cn/www/delivery/avw.php?zoneid=87&cb=INSERT_RANDOM_NUMBER_HERE&n=a576c0a2' border='0' alt='' /></a> Carlson 在1990 年提出了一种最优数据融合准则。 设分别表示状态基于传感器i 观测信息的Kalman 滤波估计值和相应的估计误差协方差阵, 对于i=1 ,2,…,N, 假设不相关, 则最优联邦滤波器最优数据融合准则由下式给出: 其中: 相应的估计误差协方差矩阵为: 可以证明: 其中P(k|k)表示的估计误差协方差。 基于第i 个传感器信息的Kalman 滤波估计器如图1 所示。Carlson 联邦融合估计算法流程图如图2 所示。图1 Kalman 滤波方框图 上一页 1 2 3 4 下一页
 分别表示状态基于传感器i 观测信息的Kalman 滤波估计值和相应的估计误差协方差阵, 对于i=1 ,2,…,N, 假设
分别表示状态基于传感器i 观测信息的Kalman 滤波估计值和相应的估计误差协方差阵, 对于i=1 ,2,…,N, 假设 不相关, 则最优联邦滤波器最优数据融合准则由下式给出:
不相关, 则最优联邦滤波器最优数据融合准则由下式给出:



 的估计误差协方差。
的估计误差协方差。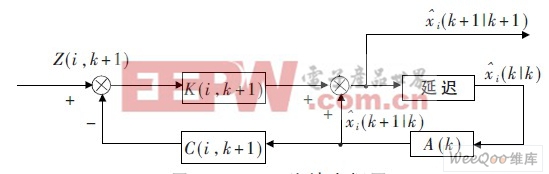







评论