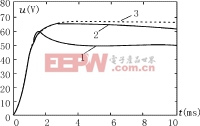
图2不同控制下起动瞬态过程的比较
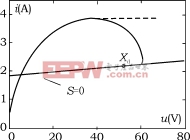
图3起动过程相平面图
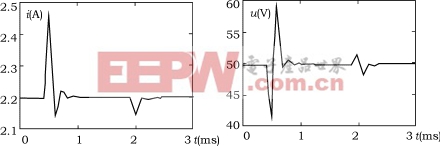
图4输入电压扰动瞬态过程
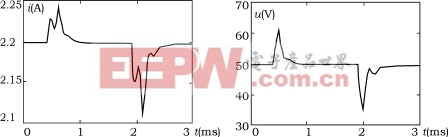
图5负载扰动瞬态过程
4结论
在实现滑模变结构控制时必须考虑实际控制中的非理想切换条件以及实际控制量的物理约束。本文提出的滑模变结构控制算法简单,对Boost电路的起动过程和稳态时系统有扰动变化时情况进行仿真,结果表明,本文的控制方案可以减少系统超调,缩短过渡过程时间,改善系统的动态品质,并有效地解决滑模控制中的高频抖动问题;稳态时,即使系统输入电压或者输出负载有较大扰动,仍然可以保证系统的稳定,控制系统具有较好的鲁棒性。
DIY机械键盘相关社区:机械键盘DIY







评论