双接收头在智能小车系统中的应用

不难发现,当l距离在[10cm,30cm](h 30cm)区间时,z2-z1的差将 > 4cm.据此我们设定了一个阈值4cm,当检测到差值大于4cm,不需要做任何刹车控制,直接直行通过,通过这样简单的计算判断,我们可以有效避免由于偏离小车中心的障碍物靠小车过近造成的z1,z2的值过小,从而引来可能的刹车误判。在做这个项目时,我们采用的车模体积不大,因此设计的阈值等不是很大,若应用到实际车模中时可根据情况改变阈值的大小。
3.2速度的计算
速度我们采取简单的近似平均进行估算,我们可以计算出系统测距地间隔约为120ms,通过将当前的测距结果与上次测距结果做差比较,根据公式7可以估算出当前速度的近似值:
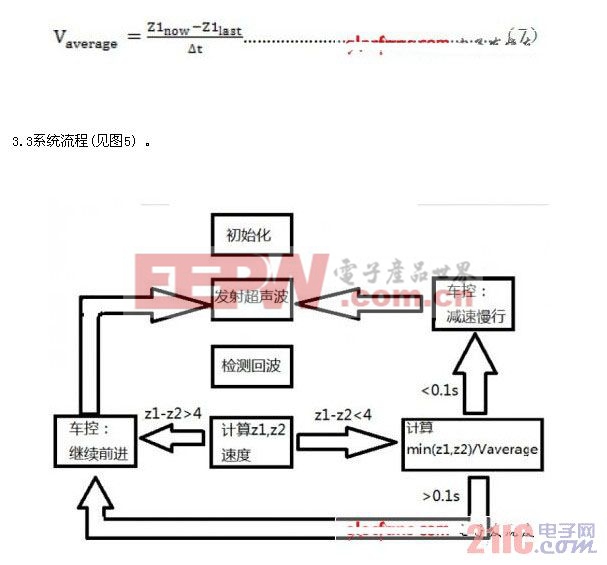
图5系统流程
4部分测试结果
表1是我们对测距电路单独的测试结果:(单位cm) 。

表1 测距结果
从此表中可以看出我们的测距电路是很精确的。






评论