4.2 实验结果分析
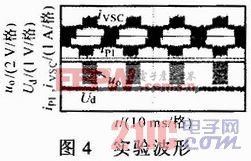
在仿真结果的基础上,进行了实验测试。实验采用2台电机对拖作为实验负载。在已有的实验平台上,对2台电机的电流(转矩)进行跟踪测试,Ud为给定电压,iPI为电机A的实际电流,iVSC为电机B的跟踪电流,如图4所示。由图可见,iVSC与iPI很好地实现了跟踪效果。
5 结论
分析了使用PI控制实现双电机力矩平衡控制所存在的不足,设计了滑模变结构控制,进行了稳定性分析,并成功地将滑模变结构控制算法应用到双电机的力矩平衡控制中。最后通过仿真,验证了该控制策略的优点,得到了理想的跟踪控制效果。










评论