基于CCD图像传感器的路径识别算法分析

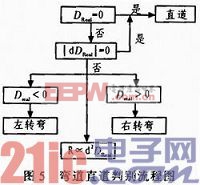
3)偏差DReal0为负值时,前方跑道为左弯道。

从而判断出小车相对中心黑线的位置。DReal绝对值的大小反映了小车中心偏离中心黑线的严重程度,|DReal|越大,表明偏离得越厉害。这样判断的好处在于不管小车是否处于弯道还是直道,只要小车中心偏离了中心黑线,即只要DReal≠0就可以当作弯道情况来进行处理。然后分别对偏差距离DReal分别进行一阶微分(dDReal)和二阶微分(d2DReal),根据偏差距离的一阶微分(dDReal),就可以得到中心黑线的变化趋势,从而判断出实际跑道是弯道还是直道,如果小车是在直道上偏离了中心黑线,则同一场数据中前后各点偏差的一阶微分值dDRe al是相等的,即中心黑线与小车视场中心的偏差距离与两者的前后距离呈线型变化。若实际跑道是弯道,则(dDReal)不等,上述关系呈非线性变化。根据偏差的二阶微分(d2DReal),可近似得到中心黑线的曲率半径R(直道曲率半径视为趋近无穷),从而得到较完整的跑道信息。以上判别过程如图5所示。
5 结束语
文中初步对智能车的路径识别进行了探索,对一些基本问题给出较为详细的分析及设计,为进一步的实践打下了较为坚实的基础,为真正智能汽车的设计提供了有益参考。



















评论