循迹小车的追踪与避障

5 系统软件实现
5.1 传感器检测情况与驱动电路分段控制
首先,红外光电开关检测前方是否有移动物体,若两光电开关都未检测到物体,此时小车开始循迹。由于实际的循迹黑线的弧度不一样,所以我们用七个灰度传感器来反映实际循迹黑线的弯度情况,同时应用单片机产生PWM占空比来配合不同的弯度,进而对电机驱动电路进行控制实现两电机以不同的速度运行来实现适度转弯。(1)当a1和b2检测到黑线时,此时说明黑线的弯度比较小,单片机输出PWM占空比为80%,其输出到电机驱动电路从而小车实现微小左转弯。(2)当a1和b1检测到黑线时,说明弯度较大,单片机输出PWM占空比为50%,此时小车实现较大转弯。(3)当仅b1检测到时,说明此时小车弯度很大,这时单片机输出PWM为300A,进而实现很大的转弯;由于传感器排布左右对称,所以右边情况类似。其次,当红外开关检测到前方有移动物体时,此时程序进入追踪模式,由于物体移动比较快,所以我们不再用PWM进行平缓转弯,而是直接由电机正反转来实现小车的快速转弯。(4)当仅左边红外检测到物体时,单片机直接产生0、1信号来让左电机反转,右电机正转,进而实现快速左转。(5)当仅右边红外检测到物体时,单片机直接产生0、1信号来让右电机反转,左电机正转,进而实现快速右转。(6)当左右同时检测到时即停转,使小车停下,程序流程图如图5所示。
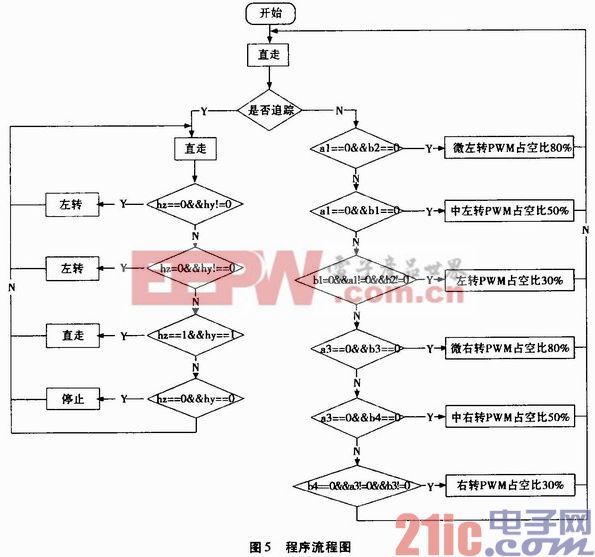
最后,若对程序进行相应的更改即能实现避障,即当红外光电开关检测到物体时,使小车转相应的角度即可实现避障。
6 结论
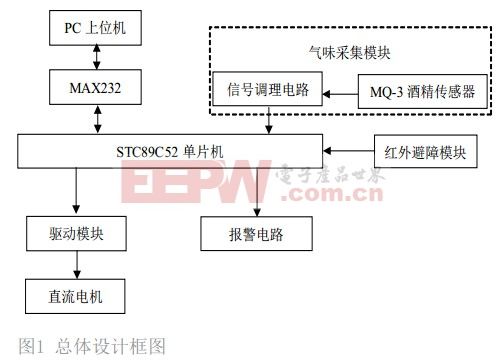
本文提出了一种基于单片机控制的智能循迹,追踪,避障小车的设计制作方法,它以STC89C52为控制核心,直流减速电机为执行元件,IR9909型反射式传感器作为循迹元件,接近开关作为避障与追踪元件。经过实验验证,该小车能自动循迹,追踪与避障,并能稳定运行。该小车智能化小车的研究不仅具有很大的现实意义,还具有极为广阔的应用前景和市场价值。



评论