CAN总线在张紧器驱动监控系统中的应用

开始
本文引用地址:https://www.eepw.com.cn/article/157819.htm
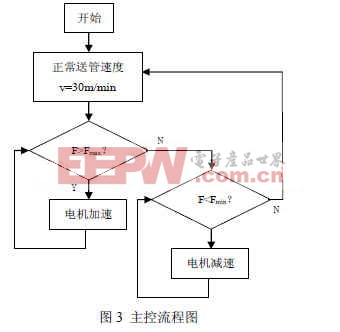
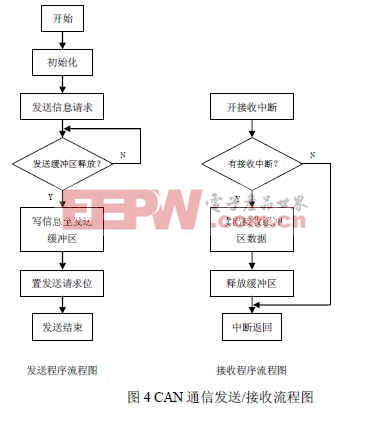
由主控流程图可以看出,软件设计的关键在于采集速度、张紧力的值和发送控制信号,所以,基于CAN的通信至关重要。 CAN通信系统的软件设计包括系统初始化、发送程序、接收程序。在完成对所有报文对象初始化后,程序进入发送/接收阶段。CAN报文的发送是个自动过程,由CAN控制器自动完成。用户只需要根据接收到的远程帧的识别符,将对应的数据转移到发送缓冲寄存器,然后将此报文对象的编码命令请求寄存器启动发送即可。发送程序结构如图4所示。
CAN报文的接收也是由CAN控制器自动完成,当接收到发送完标志位后,程序从接收缓冲器中读取接收的数据。为提高系统运行效率,接收过程采用中断的方式实现。接收程序结构如图4所示。
4 结论
深水铺管张紧器工作条件恶劣,外部环境易对监控系统信号造成干扰,本文将CAN总线技术运用于船用张紧器驱动监控系统中,重点介绍系统设计方案、CAN与单片机硬件接口设计、软件设计等内容。解决了传统电机控制方式中实时性差、响应时间长、多电机控制同步性差、信号传输抗干扰能力差的缺点,保证了张紧器对管线实现恒张力控制。 文章创新点:将控制局域网(CAN)总线应用海洋铺管张紧器这种工作条件恶劣、但对系统稳定性要求高的场合,组成具有总线式网络拓扑结构的分布式监控系统,克服了传统控制方式中实时性差、多电机工作同步性差、信号传输抗干扰能力差的缺点,为张紧器可靠工作提供了保证。

伺服电机相关文章:伺服电机工作原理










评论