基于Matlab和VC++混合编程的障碍检测系统设计

3 障碍物检测系统检测过程及结果
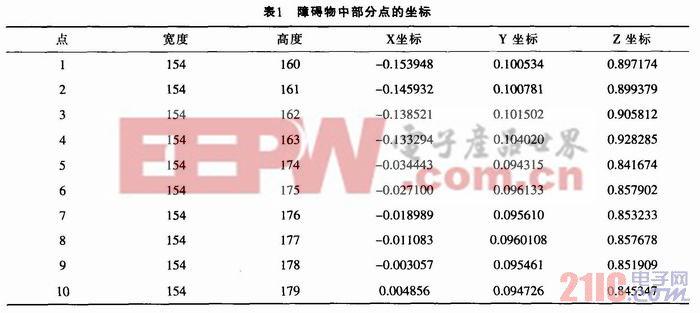
图2~5为障碍物检测系统的处理过程,即从获取实时图像、图像预处理、障碍物特征提取、特征点匹配等过程,最后通过视差法计算出障碍物的位置坐标,从而为决策控制提供必要的信息。表1为检测到的障碍物中的部分点坐标。

4 结束语
本文利用Matlab和VC++混合编程的方法,将VC++的可视化图形界面功能和MATLAB的强大图像处理功能有机的结合起来,设计出移动机器人障碍物检测系统软件开发平台。在实际的科研中,省去了编写一些复杂烦琐的图像算法代码,可以为熟悉VC语言的工程技术开发实用图像处理算法研究提供方便;利用Matlab引擎可以简单有效的实现在VC中调用Matlab的功能,因此提高了效率,缩短了软件开发周期。

c++相关文章:c++教程









评论