基于Zigbee的病房护理机远程监控系统的设计与实现

1.2 护理机网络通信协议
护理机主控板主控芯片采用的是PIC18F87K22,单片机编程采用MPLAB IDE V8.63完成。作为数据检测终端的下位机(各病房的护理机)正常工作时主动向网络协调器发送信息,各ZigBee通讯模式采用“透明模式”;上位机向下位机发送信息时,ZigBee通讯模式采用“AT命令模式”。数据发送方式采用“MSB方式”,即先发送高字节,再发送低字节。网络通信协议的帧格式如表2、表3所示,其中机器身份码选用ZigBee模块出厂时的ID号,这样不会造成地址冲突。本文引用地址:https://www.eepw.com.cn/article/154965.htm

1.3 ZigBee网络的建立过程
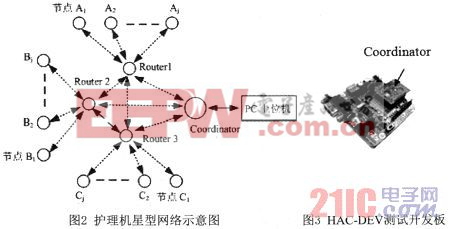
在一个ZigBee网络中的所有ZigBee模块必须具有相同的PAN ID和信道,而且网络中有且只能存在一个协调器(Coordinator),协调器用于网络的搭建。当协调器上电数秒后网络才开始启动,协调器将是网络的第一个节点,此后,各路由器(Router)可以与协调器进行连接并加入到网络中来,且加入到网络中的路由器将允许其它路由器通过连接自己而加入到网络中,整个网络中的任意两个节点都可以进行点对点通讯,并且网络中的任何一个节点都可以向网络中的所有节点进行广播;一个模块能否加入网络在于其通讯距离内是否己存在加入网络中的节点。考虑到星形网的控制和同步相对比较简单,因此系统设计时选用了星型网络方式组网(图2)。该网以一个功能强大的FFD协调器作为网络中心,负责协调全网工作,其它的数据采集节点(护理机)分布在其覆盖范围内。具体实现组网时,首先通过厂家提供的HAC-Studio上位机软件,利用AT命令设置所有入网的ZigBee设备,使它们具有相同的信道和PAN ID值,然后将协调器设备与上位监控PC机相连,并使两者设置有相同的通信口、波特率、校验位等通信参数,最后通过基于API的Windows多线程串口编程,实现ZigBee网络协调器与上位PC机监控管理程序的通信。上电后整个组网过程是自动进行的,无需人工干预。
本文设计的基于ZigBee的护理机智能远程监控系统中,整个网络的通信工作流程规定如下:
(1)下位机待机时,每隔5s,发送身份号(ID)和状态数据到上位机。
(2)下位机工作时,每隔500ms通过ZigBee模块发送身份号和当前工作数据到上位机。
(3)上位机在添加一个新的下位机ID(入网身份证号)时,主动发送命令字给下位机,然后需等待下位机的应答,若10s内下位机无对此命令的应答,应重复给下位机发送此命令。超过15s上位机未接收到下位机的应答信息,将提示与该下位机连接不成功(即认为下位机不在网络内)。
1.4 协调器与上位机软件的通信
ZigBee网络协调器与上位机监控软件的通信是通过深圳市华奥通通信技术有限公司的HAC-DEV开发测试板连接完成的。HAC-DEV开发测试板是HAC-LBee ZigBee的测试开发装置,它能够直接和HAC-LBee系列的ZigBee模块进行数据传输,ZigBee网络协调器就是安装在HAC-DEV开发测试板上的(图3),因此PC机串口的波特率、校验位等需要与ZigBee网络协调器的一致,这样才能保证硬件连接的成功。在协调器与上位监控PC机连接成功后,要实现真正的通信,必须通过上位机软件对PC机串口编程来完成。










评论