将由CompactRIO硬件平台控制的高精度机器人设备用于脑瘤手术

神经外科线性驱动器是一个机器人设备,用于在触觉主/从操作过程中以线性方式移动PRS微型源。研究人员使用一个来自英国的商业机器人NeuroMate,作为LANS的空间定位器。这样使得手术进展过程中微型源的轴,沿着肿瘤病变的主轴移动(如图2)。外科医生决定着颅腔内探头的运动。
本文引用地址:https://www.eepw.com.cn/article/110838.htm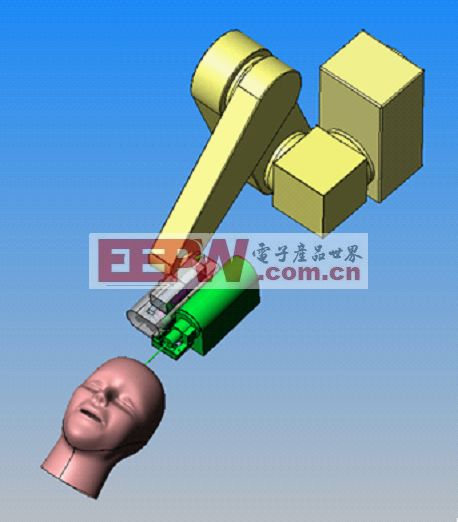
使用神经外科线性驱动器,外科医生可以感受到探头和脑组织间的相互作用力,并相应地作出反应。此外,为了提高手术操作过程中的定位精确度,一个适当的虚拟环境可以在手术操作过程中的每个阶段引导外科医生。
用于自动机器人控制的CompactRIO硬件平台
整个触觉主/从机器人系统的控制系统在管理手术过程中需要更高的坚固性和可靠性。第一个原型设计是用几个自制的控制装置创建而成,保证了控制冗余度和必要的安全状况。然而,原型设计具有一定局限性——体积大,缺乏便携性,以及需要大量的时间对控制和监督模块进行编程。
我们使用CompactRIO系统和CompactRIO I/O模块来解决这些问题。我们使用CompactRIO来创建控制器,实时地管理1千赫兹控制回路的主/从系统。冗余控制系统包含两个现场可编程门阵列(FPGA)应用程序,用于监控和监督整个手术操作过程,并且当系统检测到紧急情况时,该应用程序会进行干预。
由于CompactRIO硬件平台及其灵活的编程环境,这一解决方案比原来的原型设计更精简,更可靠和更有效率。目前,新的系统正在优化,研究人员将在不久的未来开始临床前的试验。





评论