基于伺服电机和运动控制器的目标仿真实时性控制研究

仿真结果分析
本文引用地址:https://www.eepw.com.cn/article/110150.htm图6~11为半实物仿真试验与数学仿真试验激光制导炸弹空间三维坐标变化曲线,可见两种仿真模式下试验曲线吻合良好。由于在整个弹道曲线中差别表现不明显,因此给出了各坐标相应的弹道末端局部显示曲线。
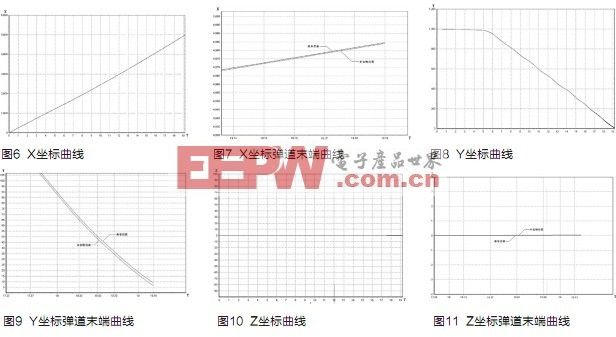
试验结果表明,数学仿真的仿真解算稳定,结果精度良好;同时,在相同投弹条件下,半实物仿真与数学仿真试验过程相关性比较好,仿真精度非常高,由此反映出目标仿真系统带入全系统的误差极小(目标系统误差占全系统误差的90%),所设计的控制系统实现了光斑大小和能量的实时控制。
参考文献:
[1]王仕成,张金生. 激光寻的制导武器目标仿真系统研制报告[R]. 第二炮兵工程学院自动控制教研室内部资料, 2004:1-20
[2]孙晶华. 目标模拟运动支架及控制系统的研制[D]. 西安电子科技大学硕士学位论文, 2004:10
[3]DMC5400简明手册. 深圳雷赛机电技术开发有限公司[D], 2005:11-13
[4]姜荣. 一种基于运动控制卡的伺服电机控制系统[J]. 测试与控制, 2006(5):113
[5]金钰. 伺服系统设计指导[M]. 北京:北京理上大学出版社,2000

伺服电机相关文章:伺服电机工作原理
激光器相关文章:激光器原理





评论