- 引言当稚晖君在厕所里用手机操控机械臂给葡萄缝针的视频刷屏时,无数网友感叹:“这就是科技与狠活!”这台名为Dummy的机械臂,不仅能远程完成微米级精度的缝合手术,还搭载AR操控、力反馈夹爪等黑科技,成本却不到1万元。作为华为“天才少年”的又一力作,它再次印证了极客精神如何用代码和算法重新定义可能性。一、硬核技术:从“工业心脏”到“AI小脑”的全面突破1. 机械结构:精度直追达芬奇手术机器人谐波减速器+步进电机:采用零背隙谐波减速器,搭配6个高精度步进电机,末端重复精度达0.02毫米,媲美工业级机械臂;铝CN
- 关键字:
机械臂
- 这个简短教程的目的是展示一种独特的爬墙方法,并展示1自由度机械臂的双重功能(不包括夹具)技术上是3自由度,因为移动/旋转机器人框架。规则基本上是这样的:收集和检索未知大小/重量的对象电池电量严重受限机器人可以远程控制允许的机器人高度/长度/宽度限制规格该机器人使用一个HS-311伺服机构用于致动储料斗,一个改进的HS-805BB用于1自由度机械臂,一个伺服机构用于机器人夹持器末端执行器,以及两个改进的伺服机构用于差速传动系。铲斗由弯曲的铝片金属制成,框架由铝原材料铣削和CNCe制成。桶内使用了特殊形状的泡
- 关键字:
爬壁机器人 机械臂

- 这里设计了一个关于避障机器人的简单项目。机器人学是一个有趣且快速发展的领域。作为工程的一个分支,机器人技术的应用随着技术的进步而不断增加。移动机器人的概念正在快速发展,移动机器人的数量和其复杂性随着不同的应用而增加。有许多类型的移动机器人导航技术,如路径规划、自我定位和地图解释。避障机器人是一种自主移动机器人,它可以避免与意外的障碍物发生碰撞。在这个项目中,我们设计了一个避障机器人。它是一个基于Arduino的机器人,使用超声波测距仪传感器来避免碰撞。电路图需要的硬件Arduino Uno超声波测距仪传感
- 关键字:
DIY Arduino 避障 机器人 机械臂

- 设计了以STM32F103C8T6芯片为主控的智能物流机器人,并对机器人系统性能进行分析。电机调速动态指标中调节时间平均为560 ms,超调量平均34.6%。随着电机转速增大,调节时间呈减小趋势。机械臂跟踪性能在PID控制下表现良好,平均每2.5 s完成跟踪目标并准确抓取,实物系统有良好的稳定性、可靠性和准确性。
- 关键字:
202304 STM32 OpenMV PID 机械臂 物流机器人

- 在这个项目中,我们使用Arduino设计了一个简单的手势控制的机器人。这个手势控制机器人是基于Arduino Nano、MPU6050、射频发射器-接收器对和L293D电机驱动器。尽管标题说是手势控制机器人,但从技术上讲,这个机器人是由手的倾斜度控制的。前言机器人是一个由计算机程序操作的电子机械系统。机器人可以是自主的或半自主的。自主的机器人不受人类的控制,通过对环境的感知来决定自己的行为。大多数工业机器人是自主的,因为它们需要以高速和高精确度进行操作。但有些应用需要半自主或人类控制的机器人。一些最常用的
- 关键字:
DIY Arduino 射频 电机驱动 机器人 机械臂

- 在这个项目中,我将向你展示如何使用Android手机建立一个Arduino和蓝牙控制的机器人手臂。这个机械臂既可以在手动模式下操作,也可以在全自动模式下编程操作。你们已经在Electronics Hub看到了一个机械臂项目,我们从废品中获得了一切(除了电机和Arduino)。我们从你们那里得到了非常好的反应,在此基础上,我们决定做一个更好的版本,如果我必须说,是2.0版。这个DIY Arduino和蓝牙机器人手臂项目是通过蓝牙通信的安卓手机操作的。我们已经为安卓手机开发了一个应用程序,你可以用它来控制机械
- 关键字:
DIY Arduino 蓝牙 机器人 机械臂
- 航天员聂海胜、刘伯明和汤洪波先后进入天和核心舱,标志着中国人首次进入自己的空间站。 “天和”核心舱由生活控制舱、资源舱、节点舱三个部分构成,在太空为宇航员和科学家提供居住和科研环境。 引人瞩目的是,“天和”核心舱外的一对大型机械臂,为我国首个具有七个自由度的机械臂,从而在太空可以实现类似人类手臂的运动能力。 七个自由度意味着什么?21所专家说,这是对人类手臂的最真实还原,是我国目前智能程度最高、难度最大、系统最复杂的空间智能制造系统,最大承载能力25吨。 核心舱机械臂通过末端执行器与目标适配器
- 关键字:
机械臂 中国空间站
- 本设计通过以MIPS构架的PIC32单片机实现对仿生六足机器人基本步态控制,使机器人可按照典型步态协调灵活运动。该六足机器人前进一步的最大距离是8CM 。一次拐弯的最大角度为30度。机械臂夹起来的重物最重为150g左右。无线摄像头数据传输的最远距离达到200米以上。
- 关键字:
六足仿生机器人 MIPS构架 PIC单片机 无线控制 机械臂
- 本机器人取名为大白菜,是一个具有5个自由度的机器人,其中3个有电机拖动,能够实现击鼓的功能。机械臂本体由铝合金制作,底座由有机玻璃制作,控制电路分为主控制电路与子控制电路,主控制电路为单片机开发板PIC及其配套系统,子控制电路为声音与触感示教系统。机器人由整体电路及PIC控制,通过离线编程设计可以根据预先设定的程序击鼓,通过示教系统设计可
- 关键字:
击鼓机器人 机械臂 声音传感器 触碰开关 PIC
- 北京时间1月2日早间消息,据美国探索频道28日报道,1945年,亚瑟-克拉克在《无线电世界》杂志发表了一篇具有历史意义的文章,详细阐述当前所有人都在使用的地球同步通讯卫星。这种卫星被他称之为“克拉克轨道”。在科幻小说中,艾萨克-阿西莫夫曾多次刻画类人机器人。现在,这种机器人在先进实验室已经非常普遍。克拉克和阿西莫夫的例子无疑是在告诉我们,随着科学技术的进步,很多一度被认为科幻的东西最终都成为现实。以下盘点的是科学家在2012年取得的一系列重大科研成就。
1.仿生假肢
- 关键字:
无线电 机械臂
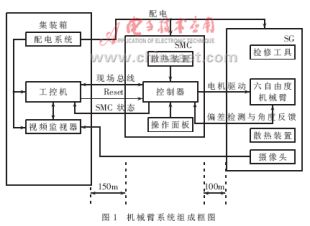
- 蒸汽发生器(Steam Generator)是核动力装置中一、二回路之间的连接枢纽,也是核动力装置运行中发生故障最多的设备之一。蒸汽发生器的故障大多是由于各种腐蚀使传热管或管与管板接头处发生泄漏,从而影响动力装置的安全运行。由于蒸汽发生器中存在放射性物质,当发生泄漏时,人不能进入其中进行维修,这时就需要机械臂代替人完成维修工作。机械臂检修系统即通过六自由度机械臂对蒸汽发生器内部进行检修和维护。该机械臂有六个关节,六轴联动;主要用于蒸汽发生器(SG)一回路侧检修活动。机械臂的手端装有适配器,可以携挂不同
- 关键字:
工控机 机械臂 蒸汽发生器 监控
机械臂介绍
您好,目前还没有人创建词条机械臂!
欢迎您创建该词条,阐述对机械臂的理解,并与今后在此搜索机械臂的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473