基于红外传感器引导的AGV设计

1 引言
本文引用地址:https://www.eepw.com.cn/article/88988.htm自动导引车(AGV-Automated Guided Vehicle)是现代制造企业及物流系统中的重要设备,是一种以微控制处理器为核心,以蓄电池为动力,装有非接触导向装置的无人驾驶自动导向运载车。它可以按照监控系统下达的命令,根据预先设计的程序,依照车载传感器确定的位置信息,沿着规定的行驶路线和停靠位置自动驾驶。AGV具有运输效率高、节能、工作可靠、无公害、柔性输送等优点,已广泛应用于许多领域。从超级市场、车间扩展到大型自动化仓库、医院及配送中心,AGV成为工业自动化的主要标志之一。本文利用缩小比例的模型车模拟实际生产线上的AGV,并采用红外传感器技术引导AGV移动。
2硬件系统设计
2.1整体设计
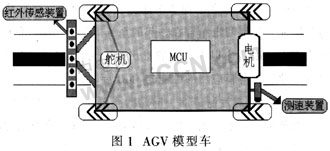
自动导引车包括车体、控制器、传感器和动力装置等4部分。其中,车体采用缩小比例的200 mm×300 mm、带有差速器的后轮驱动模型车模拟。控制器是以单片机MC9S12DG128为核心,配合车体上的传感器和动力装置以控制AGV稳定运行。传感器由测向的红外传感器和测速的霍尔传感器组成。动力装置是由蓄电池驱动的直流电机和舵机构成,分别控制速度和转向。这4部分配以相应的驱动电路,能自主识别路径,控制模型车稳定运行。AGV模型车如图1所示。
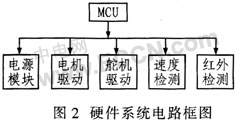
AGV与MCU可以看成一个自动控制系统,是由传感器、信息处理、控制算法、执行机构4部分组成。其硬件部分是以单片机为核心,配有传感器、执行机构以及相应的驱动电路构成控制系统;信息处理与控制算法则由控制软件完成。图2所示是硬件系统电路框图。
2.2 MCU介绍
AGV采用MC9S12DGl28作为系统控制器,该器件内置128 KB的Flash、8 KB的RAM、2 KB的EEPROM,8个输人捕捉和输出比较通道,2个8位或16位脉冲累加器,8路PWM波产生通道,8路10位ADC通道或16路8位ADC通道,2个SCI、SPI通信接口,80~112个可编程I/O端口。
2.3电源模块
AGV模型车的动力由7.2 V,2 A/h蓄电池提供。由于电路中的不同模块所需的工作电压、电流各不相同,因此需要多个稳压电路将电池电压转化为各模块所需电压。LM7805是串联稳压器,输出电压为5 V,主要为单片机、红外传感器、速度传感器及部分接口电路提供电源。而LM1117-ADJ输出为2.85 V~6 V可调稳压电源.通过电位器调节至6 V电压为舵机供电。蓄电池7.2 V电源直接为ACV模型车后轮电机供电。
2.4速度检测模块
速度传感器使用CS3020型霍尔元件。霍尔元件使用方便,只需一只上拉电阻将输出接至电源即可正常工作。在轮胎内侧粘上4个磁钢,在磁钢正对方向选择合适地方固定霍尔元件。当轮胎每转动一圈,霍尔元件输出4个信号,轮胎周长为17 cm,所以每两个信号时间差为T,AGV行驶4.25 cm。通过测量T,计算AGV的速度V=4.5 cm/T。
2.5红外检测模块
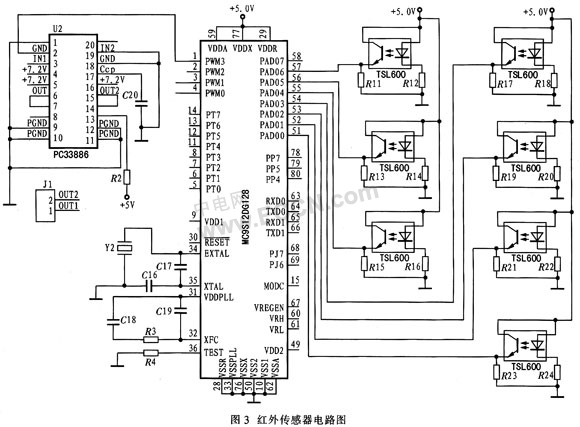
AGV模型车的引导方式为超声波引导、电磁感应引导、图像识别引导、惯性导航、红外传感器引导等。由于红外传感器使用方便、价格低廉、引导精确、响应速度快等优点,因此本系统设计采用红外传感器技术引导AGV模型车行驶。选用发射功率大、接收灵敏度高的红外传感器是保证红外检测电路可靠工作的基础。本系统设计的红外传感器选用反射式光电管TSL600。如图3所示,右边是红外发光二极管和红外接收三极管,其中,VCC为+5 V,而R1=510 Ω和R2=20 kΩ为限流电阻,OUT为输出信号。红外发光二极管发射的红外光根据反射介质色彩的深浅反射到接收三极管的光量不同。接收三极管是一种光敏三极管,接收到的光量越多,输出的电流越大。本设计在AGV模型车前10 cm处横向安装7对红外传感器,AGV中轴方向上安装1对,中轴左、右两侧各安装3对。根据7对传感器输出的信号,判断黑色引导线和AGV模型车的位置关系,为引导转向提供可靠的数据。红外接收管接收道路反射的红外光产生变化的电压,反映赛道中心线的位置。红外传感器输出量为模拟量,通过MCU的ADC将模拟量转换为数字量,不仅简化外部电路设计,同时保留红外接收管的连续变化电压信息,通过软件算法得到更精确的位置信息并消除环境光线的影响。MC9S12DG128有8路10位ADC或16路8位ADC,考虑到8位有效值已满足系统精度要求,本系统设计采用16路8位ADC中的7路通道。
2.6驱动控制模块
电机启动采用PC33886作为驱动器,驱动电路原理如图3左边部分所示。MCU产生的PWM3通过IN1引脚输入,以调节PC33886的OUT1端口的输出电压,并且IN2接地使OUT2输出为0,使得OUT1和OUT2之间产生一个压差,MCU通过改变PWM3的占空比来调节电机转速。
3系统软件设计
3.1控制算法
在连续控制系统中,按偏差的比例(P)、积分(I)、微分(D)进行控制的PID控制算法获得了广泛的应用。这种数字PID控制算法结构简单,参数易于调整,适应性强。本系统设计采用增量式数字PID控制算法,通过PWM调速直流电机。
3.2程序流程
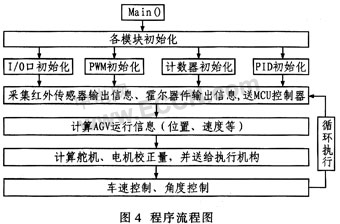
该系统的主程序流程图如图4所示。系统首先初始化设备,然后进人参数修改程序,参数设定完毕后打开中断,最后循环执行位置速度控制程序。
4 结束语
实验是在5 000 min×6 000 mm的区域内搭建U型行驶道路中进行,路中央划有20 mm宽的黑色引导线。正常情况下,给定AGV模型车的速度上限为1 m/s,AGV平稳行驶在引导线上,从出发点开始,到识别出终点并停车,全程共耗时22 s;给定AGV模型车速度上限为1.5 m/s时,AGV比较平稳地行驶在引导线上,全程共耗时16 s;给定AGV模型车速度上限为2 m/s时,AGV行驶不稳定,在拐弯处有时会冲出引导线,全程共耗时12 s。根据以上实验,AGV稳定工作的平均速度为1 m/s。AGV不是竞速车辆,工业现场一般以稳定、安全为主要考虑因素,所以本设计的模型车在稳定方面完全符合AGV车的规范,达到了自主引导、运输效率高、节能、工作可靠、无公害等要求。

霍尔传感器相关文章:霍尔传感器工作原理
霍尔传感器相关文章:霍尔传感器原理







评论