μPB1009K型GPS接收机射频率前端电路

μPB1009K是NEC公司推出的一款单片式GPS接收机电路,该电路内部集成有完整的VCDO、第2级IF(中频)滤波器、4 bit ADC、数字控制接口等电路。μPB1009K特点如下:
本文引用地址:https://www.eepw.com.cn/article/78244.htm●具有双变频功能;
●具有多系统时钟,通过片上分频器(1/N=100,3/256,9/1024,65/4096)可选择16.368MHz、16.384MHz、14.4MHz、19.2MHz或者26MHZ的TCX0频率;
●电源电压Vcc为2.7~3.3V;
●电流消耗Icc可低到26.0mA;
●采用QFN-44封装;
●价格低,体积小。
μPB1009K主要应用在基准频率为16.368MHz、第2 IF为4.092MHz的GPS接收机,以及基准频率为14.4MHz、16.384MHz、19.2MHz,26MHz且第2级IF为2.556MHz的GPS接收机中。
1 μPB1009K的功能参数
它采用QEN-44封装,各个引脚的功能如下:
●脚1(LNAout):前置低噪声放大器输出;
●脚2(Rext):接一个22kΩ的基准电阻器
到地;
●脚3(RegGND):电压调节器地;
●脚42(LNAVcc):前置低噪声放大器电源;
●脚43(LNAGED):前置低噪声放大器地;
●脚44(LNAin):前置低噪声放大器输入;
●脚4(1stMIXin):第1级混频器输入;
●脚5(1stMIXGED):第1极混频器地;
●脚40(1stMIXVcc):第1极混频器电源,使用时应连接一个旁路电容器到此端以减少高频阻抗;
●脚41(1stIFout):第1极混频器输出,在该脚和脚37之间插入IFSAW滤波器可监控VCO振荡信号;
●脚6,12(MS1,MS2):这2条引脚可用于设置TCXO频率,当MS1=L,MS2=L时,TCXO为16.368MHz或 16.384MHz;MS1=L,MS2=H时TCXO为19.2MHz;MS1=H,MS2=L时TCXO为14.4MH;MS=1H,MS2=H时 TCXO为26MHz;
●脚11(Cpout):充电泵输出,连接外接R和C到该脚,设置“转储系数”(dumping Facor)和自然角频率(Isink= Isource="0".45mA);
●脚13(Fefin):基准频率输入,设计时应连接一个外部基准频率到这个引脚,如TXCO;
●脚14(PLLVcc):PLL电源电压,设计时应连接一个旁路电容器到该引脚以减少高频阻抗;
●脚15(PLLGND):PLL地;
●脚16(CLKout):时钟(fTCXO)输出引脚端(IC测试引脚端);
●脚7(LOVcc):VCO电源端,连接一个旁路电容器到这个引脚以减少高频阻抗;
●脚8,9(VCO1,VCO2):IC测试端。当μPB1009K安装在电路板上时,该端开路;
●脚10(LOGED):VCO地;
●脚17(IFGND):IF功能地;
●脚18(2ndIFout):IF放大器输出;
●脚38(1stIFin):第2级IF混频器输入;
●脚39(IFVcc):IF功能模块电源电压;
●脚19(2ndIFin):ADC缓冲放大器输入;
●脚20(ECOFFout):直流微调运算放大器的输出;
●脚21(DCOFFint):直流微调运算放大器的直流微调脉冲输入。该脚与20脚间连接一个电容器可将输入脉冲信号转换为直流;
●脚22(GNDana):运算放大器和ADC地;
●脚23(GNDbuf):运算放大器和ADC地;
●脚24(VDDana):运算放大器和ADC比较器电源;
●脚25(VDDbuf):ADC输出驱动放大器电源,连在该脚接一个旁路电容器以减少高频阻抗;
●脚26(GNDsub):CMOS基底接地端;
●脚27-30(D0-D3):数字输出端,LSB为D0,MSB为D3;
●脚31(SCKin):要样时钟信号输入;
●脚32(AGCin):AGC控制脉冲信号输入;
●脚33(AGCout):AGC控制信号输出;
●脚34(VDDlongi):电源控制逻辑电路电源;
●脚35(GNDlingi):电源控制逻辑电路地;
●脚3,37(PD1,PD2):用于设置电路的工作模式。PD1=L且LD2=L时为睡眠模式(所有电路关断);PD1=L且PD2=H时为 “热”模式(PLL导通);PD1=H且PD2=1时为校准模式(PLL+IF+ADC导通);PD1=H且PH2=H时为有效模式(所有电路导通)。
2 μPB1009K的应电路
μPB1009K的内部结构和应用电路如图1所示,由图可见,该电路内部集成有前置放大器、第1级IF混频器、第2级IF混频器、PLL、完整的VCO、第2级IF(中频)滤波器、4 bit ADC、数字控制接口等电路。
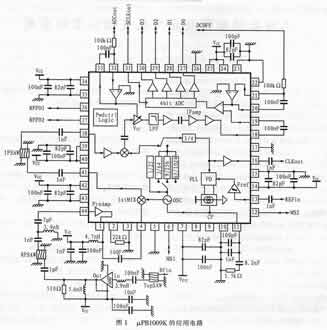
μPB1009K的工作模式可以利用PD1端和PD2端来进行控制,其TCXO频率可以利用MS1端和MS2端来选择。
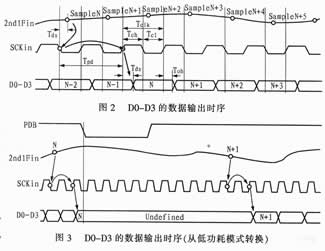
图2所示是D0-D3的数据输出时序。在有效工作模式,采样N数据一般会被延迟1.5个时钟输出,D0-D3数据在采样时钟的上升沿输出,延迟时间是Tod。当工作模式从有效模式转换到低功耗模式时,在低功耗模式工作前,输出数据状态将被保持。
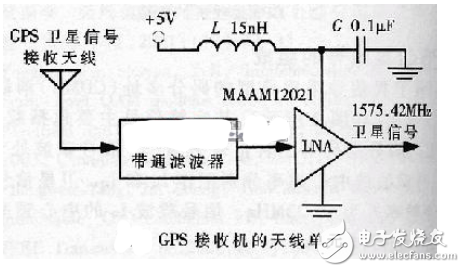
图3给出μPB1009K从低功耗模式转换到有效工作模式时D0-D3的数据输出时序。实际上,在低功耗模式控制信号被清除的7.5个时钟内,D0-D3的数据输出没有定义。

评论