伽利略开发板和BeeMail(三):对象

弹簧上配备寻呼机马达的蜜蜂模型
本文引用地址:https://www.eepw.com.cn/article/265933.htm
图注:弹簧上配备寻呼机马达的蜜蜂模型
第三部分:对象
串联电路的大部分其他部件是伽利略板和软件驱动工程。安装虽然只关乎对象本身,但对我来说却是重中之重。
蜜蜂模型
下图是我在英特尔体验店进行技术研发的成果,这里我拿来用在项目中。

图注:三菱公司VCR底部的蜂巢结构
做围绕蜜蜂模型主题的想法其实诞生于12月中旬,那时我接触到三菱公司VCR底部的蜂巢结构。 蜂巢结构让塑料更加坚固,这样制造商就可使用更少的材料。
蜜蜂模型底部

图注:蜜蜂模型的弹簧和配有垫圈系统的结构
于是我开始搜集弹簧,打印机最好不过了。尽管我已经从手机里收集了一些,我的震动马达还是取自赛后的清扫机器人。垫圈使弹簧底端固定更牢靠。使用不同类型的弹簧意味着每个蜜蜂模型都有其各自的性能。
蜜蜂模型的最终版翅膀模型,材料为塑料和手工纸
蜜蜂装上翅膀后
蜜蜂的躯干由索引卡制成。最终,棕色手工纸和从废弃包装上弄到的薄塑料包装纸搭配出最漂亮的翅膀外形。塑料和天花板上的透明板材重量相当,纹理绘以三角帆平底帆船。

图注:给电话交换线焊上接头,以便其在面包板上工作。
每个蜜蜂马达通过电话分机抢救了电话机交换线路。我从大卖场旁的电子城买了热收缩器连接接合点。一些裸露在外的金属丝通过强有力的焊接固定引脚接头,用于电路试验板测试。
电路图
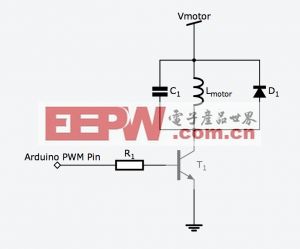
如果是UNO我就会打算直接驱动寻呼机马达,但是有了伽利略板,我就想试试看能不能找出更好的办法。对于驱动寻呼机马达的最佳方式,Precision Microdrives给出了系统清晰的解释。
通过微控制器引脚驱动马达的原理图,在circuits.io上得到的输出截屏。因为我想测试下这个系统。
•马达(取自于废弃清扫机器人)
•V马达, 3.3V 供电电源 (下图中的黄色导线)
•晶体管 (PN2222A)
•限流电阻(220 Ω)
•二极管* (*回扫保护. 功率等级不作要求. 最好是肖特基二极管,我用了一个1N5817)
•电容器* (*任选:用于无线电非传感器电路中,10到100p,我没选)
将各器件和Arduino模型板都连好,即得到如下电路结构。我用的是旧的原型扩展板,新的在Adafruit和SparkFun上都可以买到。
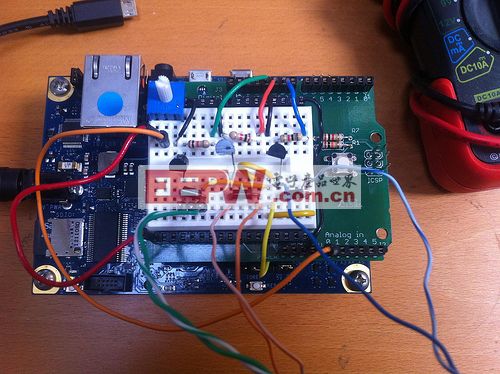
电路(晶体管分别驱动3个寻呼机马达)

电容器相关文章:电容器原理





评论