MDO混合域示波器在物联网的应用

物联网行业的发展趋势与设计挑战
本文引用地址:https://www.eepw.com.cn/article/260378.htm随着现代传感器技术和无线通信技术的发展,物联网已经开始进入人们的日常生活。以RFID、ZigBee技术和NFC近场通信等技术为代表的物联网应用,正在成为众多企业、高校研发和创新的方向。虽然针对这些技术,半导体厂商提供了各种专用芯片,甚至是集成度很高的解决方案,但在设计一个实际的物联网设备时,工程师仍然面临着很多挑战。其中一个最重要的因素是如何测量系统中时间相关的时域和频域信号。RFID和ZigBee技术中应用到的RF信号虽然不是十分复杂,但信号的质量、功率和时序关系决定着系统能否正常工作。而这些RF参数本身不仅和射频发射/接收电路有关,还受到基带电路和控制电路的影响。内部寄存器的读写、电源的工况甚至是系统延迟时间的大小,都会决定整个系统的工作状态。传统的示波器或频谱分析仪是无法完成这种时间相关的时域和频域信号综合调试工作的。
MDO混合域示波器的创新设计理念
泰克MDO4000系列混合域示波器独特的创新理念,为调试跨域的时频相关的系统提供了独一无二的工具。MDO4000在一台全功能的混合信号示波器的基础上,增加了一台3GHz或6GHz的频谱分析仪,可以完成普通频谱分析仪的各种频域测量功能。完全独立的示波器时域采集系统和频谱分析仪频域采集系统,既可以独立工作,也可以通过触发协同工作。通过移动频谱时间,用户可以在示波器采集到的时间窗口内,观测在射频通道采集到的任何一点的RF信号的频谱情况。MDO还提供了RF信号的幅度、频率和相位相对于时间变化的调制域分析功能。这些独有的功能帮助用户测量RF信号的各种调制信息。使用频谱分析仪的工程师经常面临的一个问题是如何准确地触发并捕获到关心的RF信号。由于传统的频谱分析仪触发功能很有限,用户很难做到一点。MDO4000不但可以通过RF信号的各种特征进行触发,还可以使用示波器的触发系统,通过基带或控制信号完成RF信号的触发采集,这种功能极大地降低了调制物联网设备的难度。
在调试RFID系统时,工程师面临的一个重要的困难是如何测量标签的返回信号。由于标签返回信号的幅度很小,使用普通的示波器往往难以捕获这一信号,更不要说对其幅度和频率做进一步分析了。主要原因是普通示波器的动态范围只有40dB,无法捕获微弱的标签信号。MDO4000具有60dB的动态范围,以及低至-152dB/Hz 的底噪,能够很好地胜任同时捕获读写器信号和标签信号的任务。其独特的AvsT射频信号幅度的时域波形功能,甚至可以显示标签信号幅度变化过程。
下面我们以一个13.56MHz的RFID读写器系统为例,介绍MDO4000的跨域调试应用。
在RIFD系统研发中MDO混合域示波器的应用

图一 采用NXPCLRC632芯片的RFID读写器
测试13.56MHzRFID读写器的RF信号质量参数
13.56MHz高频RFID系统是目前国内应用最为广泛,技术较为成熟的射频识别系统。相关的国际标准对射频发射频率、信道带宽、发射功率等参数都有明确的要求,特别是RF信号的幅度(功率)随时间变化的情况,标准有着严格的规定。以读写设备为例,读写设备发出的载波信号的幅度变化时间,必须符合 ISO18000-3标准对于t1-t4的时间限制。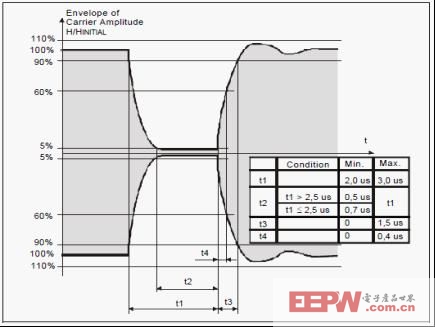
图二 ISO18000-3 13.56MHz RFID空中接口时间参数规范
通过使用MDO4000独特的触发功能,用户可以轻松稳定捕获RFID的时域和频域信号。如图所示,由于载波信号幅度在变化,使用传统手段很难测量出RF 信号从90%下降到5%的T1的时间长度。我们可以打开AvsT调制曲线,它代表了RF信号的幅度相对于时间变化的轨迹。通过自动测量或手动光标测量,我们可以轻松得到T1的准确时间。同理可以完成其他时间参数的测试。
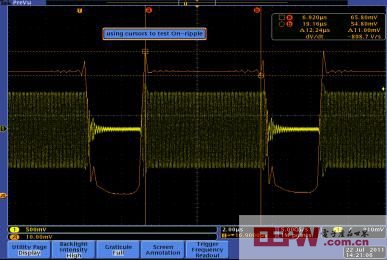
图三 13.56MHzRFID PCD到PICC信号的时域和AvsT调制域波形

图四 测量PCD发射信号与标签返回信号间的延迟时间
测试PCD到PICC的读写时间
另一个需要严格保证的时间是从读写器发出读卡信号后到标签返回信号的时间。过长或过短的时间都会被认作读写失败。使用传统仪器测量这些信号的难度很大。MDO4000可以将RF信号的AvsT的轨迹完整展示的屏幕中,用户只需用光标定位到相应位置,即可得到这一延迟时间。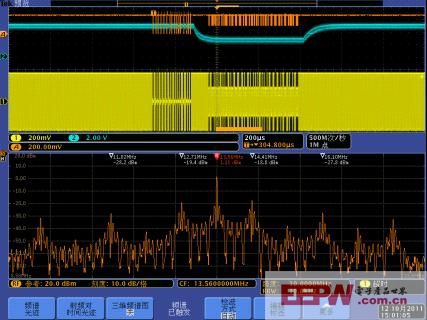
图五 13.56MHz RFID射频信号的时域波形、调制域波形与频谱显示
使用ASK调制方式的RFID系统是通过副载波传输数据信息的。在上图的频谱部分,我们可以清楚地看到射频信号的载波是13.56MHz,副载波信号为±800KHz左右。符合相关规定的要求。如果需要测量射频信号的射频参数,如信道功率、邻道功率比或占用带宽等,通过选择MDO4000的自动测量功能,可以在屏幕中直接显示这些测量结果。
如果设计人员希望了解RFID系统传输的数据情况,MDO4000同样可以提供强有力的支持。MDO4000可以提供RF信号的IQ数据。将这些数据导入泰克的RSAVu软件后,可以完成RFID数据的解码、射频指标计算等工作。如下图所示,使用RSAVu软件读取MDO4000提供的.TIQ数据,软件可以计算得出RF信号的幅度时域波形,计算得出EVM、调制深度、调制系数、频率偏差、码速率等参数。并可以将这些RF信号代表的数据解码显示出来。简化了设计人员的调试难度。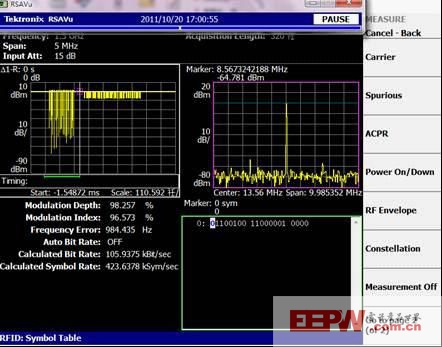
图六 RSAVu自动测试和解码功能
MDO的系统级调试和分析功能
RFID读写器是一个包含了基带微控制器、RF发射和接收模块以及电源和控制总线的复杂的射频嵌入式系统。基带控制信号和系统内部寄存器的状态直接影响系统的工作状态。以我们测试的读写器为例,NXP CLRC632读写控制芯片包含了 压控振荡器、锁相电路、编码、解码、混频和发射/接收功能,芯片的工作受到单片机芯片STC 90c58RD+的控制。
测试系统控制信号与TX和RX信号的时序关系

图 七 Rx信号与射频信号的时域关系
NXP CLPC632射频芯片的相关管脚可以测量得到射频发射的控制信号,如上图所示的CH2蓝色波形,我们可以将这些控制信号与RF信号的时域波形,以及RF信号的AvsT波形同时测量,这样我们就可以简便地观察到各种控制指令对射频发射的影响。

图八 通过SPI总线捕获寄存器状态数据
单片机芯片与读写控制芯片之间通过SPI总线通信。读写控制芯片的实际工作功能,通过更改内部寄存器的数值加以管理。如:地址14的寄存器为 codercontrol寄存器,控制编码时钟和模式。当该寄存器的第三位至第五位的值为000时,则编码速率为848KB,当数值为011时,则为一个典型的ISO1443A编码标准,码速率为106KB,数值为100时为ISO1443 TYPE B的编码速率。这调试实战中,如果我们发现频谱副载波信号的频率与我们设计的传输码速率不一致时,我们可以通过捕获相应地址的SPI总线数据,查看相应的寄存器的数值,确定出现此类问题的原因。Codercontrol寄存器的0-2位,控制的是传输数据的编码形式。如果在设计调试中发现有数据通信不能建立的问题,可以检查这三位的数值,核查实际的编码形式是否正确。“000”代表ISO14443-B的NRZ非归零编码,“001”表示 ISO14443A的Miller编码,而“110”和“111”则表示ISO15693标准对应的编码形式。
总结
MDO4000混合信号示波器独有的时间相关的跨越分析功能,为以RFID为代表的物联网设备的研制和调试提供了有力的工具。使用MDO4000不但能够轻松测量信号的模拟波形、频谱状况和各种频域参数,更可以通过AvsT、FvsT和ΦvsT这些调制域轨迹,简便地验证产品是否符合国际和行业标准的规定。更重要的是,由于将模拟信号、数字信号和总线信号,与射频信号在时间上关联起来,我们既可以通过这些信号时序关系,验证系统实际工作的过程,也可以通过对总线信号、寄存器数据的分析,查找除产生故障的原因。目前MDO4000是市场中唯一一种能够提供此类功能的测试仪器。我们希望MDO4000能够加速物联网产品的设计,为整个产业的发展贡献力量。
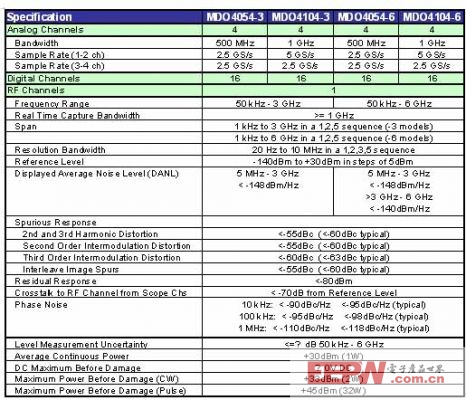
MDO4000混合域示波器主要指标:
典型配置:
MDO4054-3 混合信号示波器(如果设计2.4G RFID系统,建议选择MDO4104-6)
DPO4EMBD总线分析模块(I2C+SPI总线)
MDO4TRG高级射频触发模块
专用标签天线工装
泰克近场探头套件(型号:119414600,100KHz-1GHz)
BNC电缆
BNC三通适配器
RF401是新推出的数传频段433MHz单片无线收发一体芯片,该芯片集成了高频发射、高频接收、PLL合成、FSK 调制、FSK解调、多频道切换等功能,具有性能优异、功耗低、使用方便等特点,nRF401 的外围元件很少,只包括一个基准晶振和几个无源器件,没有调试部件,这给研制及生产带来了极大的方便。
表1是NRF401电气性能参数
表2是NRF401引脚功能表
是RF401的典型应用电路,天线口ANT1 ANT2输出至一600 的印制天线,C10 C11为天线回路的皆振电容,R4的作用是适当降低天线回路的Q值.该电路的最大发射功率为10dBm,接收灵敏度高达-105dBm.开阔地的使用距离最远可达1000米。如需要加大使用距离可在ANT1 ANT2输出口加一600-50平衡非平衡变换电路并接入输入输出放大和转换电路.
该电路即是发射电路也是接收电路.采用单片机IC2.PIC16C57控制NRF401的收发状态,同时单片机还同时完成编解码等工作。在发信状态时IC2接收到按键按下的低电平信号,从脚送出高平使NRF401进入发射状态.同时随机选通不同的晶体并在CS的配合下使发射频率在4.44..6种之间跳变.在每个频点DIN传送两频相同的数据信息.燃后跳到下一频点.
无按键按下时为接收状态,此时IC2 脚送出低电平使NRF401进入接收状态.同时按顺序选通各个的晶体并在CS的配合下使接收频点在4.44..从低至高顺序变化.每个接收频点工作时间为发射频点工作时间的7倍.以保证在每个接收频点的工作时间内能接收到一次完整的发射信息.接收工作时序如下图.
接收到的信息经IC2处理解码后从相应的按键口送出.由于接收状态的每一频点的工作时间是发射的7倍.因此当几个发射跳频图普不同的发射同进工作时.接收能分时接收每个发射的信息作出相应输出.在具有多个遥控器的遥控系统中保证了在两个以上遥控器同时使用时,每一个遥控器的控制信息都能得到执行.克服单一工作频率的遥控系统中不能两个遥控器同时使用的问题.同时多频点工作方式也大大加强了系统的抗干扰能力.在要求可靠性非常高的遥控系统中遥控器能通过接收器反送回的息了解操作是否得到执行.
电路中EEPROM用于存放发射频率跳变的顺序和编码数据.

物联网相关文章:物联网是什么






评论